

8.1 – Généralités
La longueur d’onde est définie comme la distance physique parcourue par une onde radio durant un cycle de transmission.
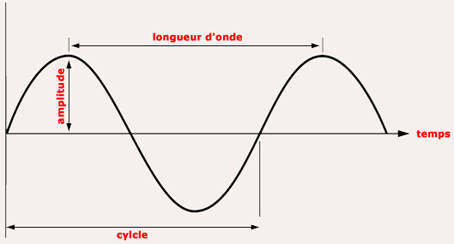
Une onde radioélectrique est caractérisée par :
– son amplitude : la déviation maximale d’une oscillation
– sa fréquence : nombre de cycles par seconde, exprimée en Hertz (Hz)
– sa longueur d’onde : distance physique parcourue par une onde radio durant un cycle de transmission
Exemple :
Une onde avec une fréquence de 30 MHz se reproduira 30 000 000 fois par seconde (soit 30 millions de cycles par seconde).
La vitesse de la lumière est d’environ 300 000 km par seconde (soit 300 millions de mètres par seconde). 300/30 = 10 mètres. 10 mètres c’est la distance physique parcourue par une onde radio durant un cycle !
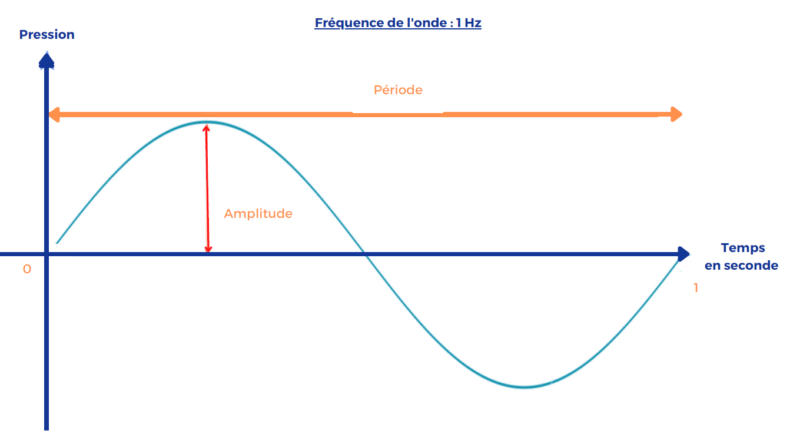
Les ondes électromagnétiques sont des flux capables de transporter l’énergie et les informations. Elles se déplacent à une vitesse avoisinant celle de la lumière, 300 000 km/s. Elles se composent d’une composante magnétique (H) et d’une composante électrique (E), et sont caractérisées par :
- amplitude : volume ou distance d’oscillation de l’onde, écart maximum d’une oscillation.
- longueur d’onde : distance parcourue par l’onde dans un cycle de transmission
- fréquence : en Herts (Hz), c’est le nombre de cycles réalisés par l’onde pour uen seconde. Elle est d’1 Hz sur ce dessin
- La définition de l’amplitude d’une onde électromagnétique est la déviation maximale d’une oscillation.
La fréquence entre un aéronef télépiloté et une radiocommande est de 2.4 GHz (2 400 MHz). La puissance maximale d’émission en France est de 100mW.
La fréquence pour la transmission vidéo entre station au sol et aéronef est de 5.8 GHz. Ce sont les ondes SHF, puissance d’émission maximale 25mW.
Les ondes VHF ont une fréquence évoluant entre 30 et 300 MHz
Les ondes UHF ont une fréquence entre 300 et 3000 MHz
Les ondes SHF ont une fréquence entre 3000 et 30 000 MHz
Une onde de 300 MHz reproduira son cycle 300 millions de fois en 1 seconde.
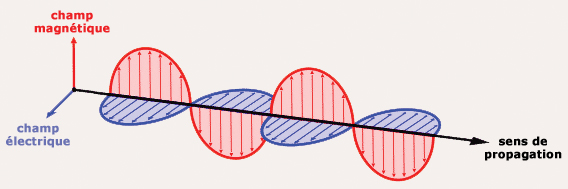
Une onde électromagnétique est constituée d’un champ électrique oscillant (E) et d’un champ magnétique oscillant (H). Le champ (E) et le champ (H) sont perpendiculaires l’un à l’autre.
8.2 – Diffusion des ondes radios
Les ondes électromagnétiques sont classées en gammes d’ondes selon leur fréquence :
– VLF (Very Low Frequency)
– LF (Low Frequency)
– MF (Medium Frequency)
– HF (High Frequency)
– VHF (Very High Frequency) –> utilisée pour les communications.
– UHF (Ultra High Frequency) –> utilisée par les télécommandes, les satellites et les récepteurs GPS.
– SHF (Supra High Frequency) –> utilisée pour la transmission vidéo (5,8 GHz)
– EHF (Extremely High Frequency)
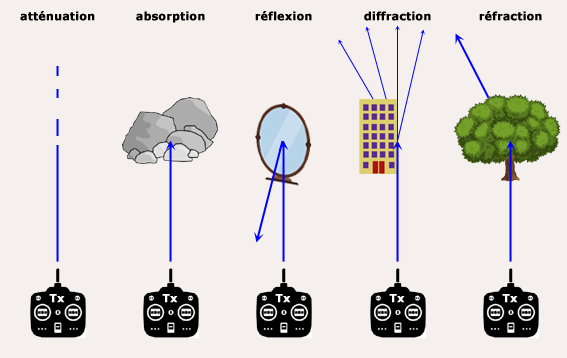
Les télépilotes ont recours aux ondes VHF, UHF et supérieures. Elles peuvent être perturbées par des obstacles physiques ou électromagnétiques.
- l’absorption : onde absorbée par un obstacle rencontré
- L’atténuation : atténuation de l’onde lors de la progression de l’aéronef, jusqu’à perte totale de signal.
- Le brouillage : perte de contrôle de l’aéronef causé par un dispositif de brouillage, qui peut être volontaire ou malveillant.
- la diffraction : diffusion de l’onde derrière un obstacle ou une ouverture. L’élargissement du signal engendre une baisse de l’intensité. Dans ce cas, les ondes ne se propagent pas en ligne droite, mais se dispersent ou se « courbent » autour de l’obstacle ou à travers l’ouverture.
- La réflexion : l’onde rebondit en heurtant un élément physique extérieur et n’est pas absorbé
- la réfraction : l’onde traverse un obstacle mais sa direction est déviée suite au changement d’atmosphère rencontré
Qu’est-ce que le phénomène de « fading » ? des interférences entre l’onde de sol et l’onde de ciel. Lorsqu’un récepteur reçoit en même temps les ondes de ciel et les ondes de sol, les deux signaux vont se superposer et se soustraire, entrainant une disparition du signal.
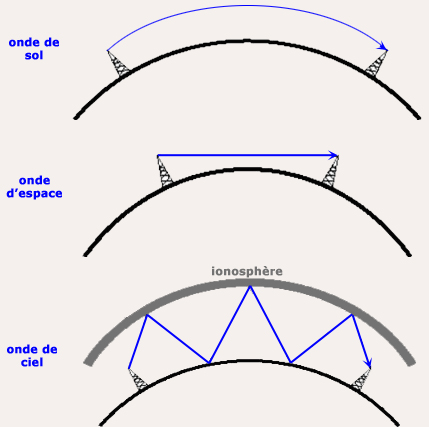
La propagation des ondes s’effectue de trois manières:
– par onde de sol (elles suivent la courbure de la surface de la terre)
– par onde directe ou d’espace (en ligne directe, en « portée optique »)
– par onde de ciel ou ionosphérique (par rebond sur l’ionosphère)
Ces différents types de propagation, en fonction de la fréquence de l’onde utilisée, entraine des anomalies nommées « interférences« , qui sont un mélange d’une onde électromagnétique avec une autre, comme par exemple le « fading » (lorsqu’un récepteur reçoit en même temps les ondes de ciel et les ondes de sol, les deux signaux vont se superposer et se soustraire, entrainant une disparition du signal).
Les ondes VHF et supérieures (UHF/SHF/EHF) qui nous concernent pour le télépilotage, se propagent uniquement par onde d’espace (en « portée optique »). La diffraction sera extrêmement faible et elles ne se réfléchissent pas sur l’ionosphère. La portée est donc relativement réduite pour nos missions, et vite perturbée par les obstacles.
Pour doubler la portée d’une transmission radio, la puissance doit être augmentée d’un facteur au carré.
Prenons un exemple : vous avez une transmission radio qui a une portée de 10 km et vous voulez la passer à 20 km. Si vous doublez la puissance de l’émetteur, vous augmenterez votre portée de la racine carrée de 2 (1,414). Donc si la transmission originale avait une portée de 10 km, elle est maintenant de 10 x 1,414 = 14,14 km. Pour arriver à 20 km, il faut à nouveau augmenter de la racine carrée de 2 : 14,14 km x 1,414 = 20 km. La puissance doit être multipliée par quatre (x2²) pour doubler la portée.
En augmentant la fréquence d’une onde électromagnétique, la longueur d’onde diminue. La relation entre la longueur d’onde et la fréquence est : Longueur d’onde = vitesse de la lumière / fréquence. Si la fréquence augmente, la longueur d’onde diminue.
En rapport à la propagation des ondes radio, un cycle est défini comme une série complète de données d’un processus périodique.
8.3 – Navigation par satellite
Chaque satellite envoie en permanence au travers d’un message de navigation des informations qui permettent de connaître avec précision sa position dans l’espace à un temps T, ce sont les almanachs et les éphémérides.
Les almanachs sont constitués de paramètres qui permettent d’estimer à moyen terme la position de l’ensemble des satellites en fonction du temps. Ils sont utilisés pendant la phase d’acquisition pour identifier les satellites en visibilité.
Les éphémérides sont constituées d’un ensemble de paramètres décrivant de manière très précise l’orbite d’un satellite en fonction du temps, permettant ainsi de calculer la position du satellite à un instant t avec une précision de l’ordre d’un mètre.
Le drone doit recevoir 3 satellites pour identifier sa position 2D (GNSS, Global Navigation Satellite System), qui regroupe stations au sol, ensemble de satellites et récepteurs (utilisateurs).
En employant le GPS, l’information de position primaire est dans la forme de sphères, avec les satellites dans le centre des sphères.
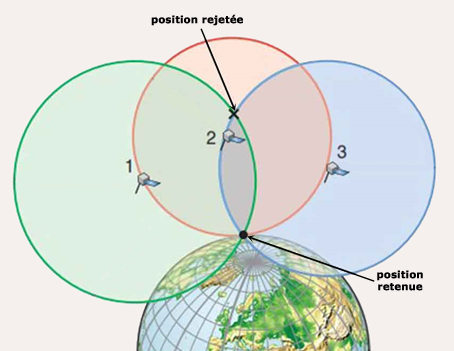
4 satellites doivent communiquer l’heure, la latitude, la longitude et l’altitude au récepteur pour un positionnement 3D.
La fluidité de l’information est liée au nombre de satellites captés par l’aéronef. Ce nombre varie en fonction des barrières de diffusion, soit extérieures soit propre au drone.
L’ellipsoïde WGS-84 a été choisi comme référence pour le calcul de l’altitude du récepteur avec le système GNSS car la terre n’est pas vraiment ronde.
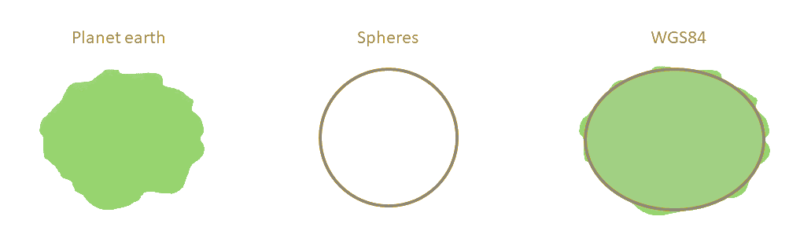
La précision peut connaitre une variation de 10 mètres. Cette précision peut être améliorée.
Concernant le système de localisation NAVSTAR-GPS, le mode « Search the Sky » est une procédure qui débute après la mise en marche du récepteur, s’il n’y a pas de donnée relative aux satellites stockée en mémoire.
Dans le domaine du système de navigation par satellite NAVSTAR/GPS, le terme « inclinaison » désigne l’angle entre le plan orbital et l’angle équatorial.
La latitude maximale de la trace au sol de l’orbite d’un satellite NAVSTAR/GPS est 55°N/S.
Dans un système de navigation inertiel, l’intégration simple de la vitesse permet d’obtenir la distance parcourue. Le système de navigation inertiel est notamment composé de l’IMU (Unité de mesure inertielle) sur un drone. Si on se déplace à une vitesse de 20 km/h pendant 6 minutes, on connait la distance parcourue : 2 km. Le calcul donné en exemple ci-dessus est volontairement simple pour expliquer la bonne réponse, 6 minutes étant 1/10ème de 60 minutes (1 heure). Donc 1/10ème de 20 km/h = 2 km de parcouru. La réponse pour être plus précise, devrait indiquer « la distance parcourue sans vent« . Pour connaitre la position (sans aide d’un GPS), il faudrait être capable d’intégrer le vent, car on a pu dériver à droite ou à gauche, et/ou être poussé ou être freiné. Il faudrait donc une intégration double.
Dans une centrale inertielle (IMU), les accélérations sont mesurées dans un repère orienté selon les axes de l’aéronef (longitudinal, latéral, normal).
Parmi les configurations géométriques de satellites GPS la plus favorable vis-à-vis de la précision de positionnement est 3 satellites à faible élévation au-dessus de l’horizon, séparés les uns des autres de 120° en azimut, plus un quatrième satellite à la verticale du récepteur..
8.4 – Les systèmes GNSS opérationnels
Ces systèmes communiquent les informations sur l’état du système, le décalage horaire UTC, le positionnement des satellites (éphémérides) et le retard ionosphérique.
3 systèmes à connaître :
- GLONASS (russe)
- NAVSTAR (américain) – 24 satellites à 20 200 km d’altitude, sur 6 orbites, incliné de 55° par rapport à l’équateur
- GALILEO (européen)
Un angle de masque (masque angle) est établi dans un récepteur GPS pour refuser au récepteur l’usage des satellites GPS ayant une hauteur inférieure à celle de l’angle de masque.
Le segment de contrôle du système GPS consiste en une station de contrôle maître, des stations de surveillance et des antennes sol. Le segment de contrôle comprend une station maître et cinq stations de surveillance réparties autour de la terre. Ces dernières captent grâce à un réseau d’antennes les signaux émis par les satellites et les transmettent à la station maître. Cette dernière analyse les informations, détecte les dysfonctionnements et apporte les corrections qu’elle transmet aux satellites.
Concernant l’utilisation du GPS, la diminution de la précision (DOP) est une perte de précision résultante de la position relative des satellites visibles.
Le système NAVSTAR se compose de 3 segments :
– Le segment spatial : c’est l’ensemble des satellites. Il se compose des 24 satellites nécessaire pour obtenir une couverture mondiale. Ils sont équipés d’horloges atomiques fournissant un temps avec une très grande précision. Sa fonction est de transmettre un signal utilisé par un récepteur adapté à calculer le temps, la position et la vitesse.
– Le segment de contrôle : cinq stations de contrôle réparties dans le monde. Ce segment correspond à l’ensemble des stations de contrôle (une station de contrôle maître + des stations de surveillances et des antennes sol) chargées de surveiller les satellites. Ces stations s’assurent que les données transmises par les satellites sont mises à jour de temps en temps par les stations sol.
– Le segment utilisateur : les récepteurs des utilisateurs. La principale fonction de ce segment est sélectionner les satellites appropriés automatiquement, suivre les signaux et mesurer le temps mis par les signaux des satellites pour atteindre le récepteur. Les récepteurs disposent des données de l’almanach utilisées pour l’identification rapide des signaux reçus provenant des satellites visibles. Le récepteur identifie chaque satellite par le PRN (« Pseudo Random Noise » ou bruit pseudo-aléatoire) qui lui est propre.
Le module GPS d’un drone reçoit des informations des satellites visibles. Le module GPS mesure la position de votre drone en mesurant combien de temps un signal prend pour voyager depuis un satellite. Le module GPS est également capable de donner une estimation de l’altitude de votre drone. Cependant, les modules GPS sont plutôt imprécis et vous donneront une position à moins de 5 m. Toutefois, en combinant des mesures provenant d’autres capteurs, le contrôleur de vol peut obtenir une meilleure image de ce que fait le drone. La principale caractéristique du module GPS est que vous pouvez piloter de manière autonome votre drone vers des points de cheminement, de sorte que votre drone puisse potentiellement voler seul, du décollage jusqu’à l’atterrissage.

Comme le module GPS a besoin de voir le ciel, il est souvent monté sur le dessus du drone. Sur un multi-rotor, la plupart des constructeurs de drones utiliseront un mât GPS pour éloigner le module GPS loin de tous les autres appareils électroniques afin d’assurer la réception d’un signal GPS non perturbé.
8.5 – Définitions générales & rappels
Autorité ATS : instauré par l’Etat pour délivrer les services nécessaires à la circulation des aéronefs
Aires d’aérodrome :
- trafic : stationnement, entretien, carburant, embarquement
- manœuvre :atterrissage, décollage, aires hors trafic
- mouvement : manœuvre + trafic
- atterrissage : décollage et atterrissage
AFIS : L’Aerodrome Flight Information Service (AFIS) est un type de service de la circulation aérienne, correspondant aux services d’information de vol et d’alerte sur des aérodromes. Rôle informatif.
Circulation aérienne : globalité des aéronefs en vol ou en mouvement sur une aire de manœuvre
Cap : définit l’orientation de la partie avant de l’appareil par rapport au Nord
Détection et évitement : principe de voir, d’anticiper ou de reconnaitre des dangers et conflits de circulation, accompagné de la mise en oeuvre de solutions adaptées.
IFR : règles de vol aux instruments
IMC : conditions météorologiques de vol aux instruments.
Publications d’Informations Aéronautiques ou AIP :
- GEN : généralités administratives
- ENR : information sur les routes
- AD : infos sur les aérodromes et hélistations
NOTAM (urgent) : 7 jours d’avances pour les modifications ou nouveaux éléments pour une zone. Consultable sur SIA. Ex : activité de parachutisme
SUPAIP : info temporaires précisent les AIP et imposent les ZRT (règlementée), ZIT (Zone interdite temporaire) et ZDT (dangereuse)
Niveau : désigne la hauteur ou l’altitude sur un plan vertical
Plafond : limite supérieure d’une zone de vol, également couche de nuage la plus proche de la Terre
QFE : valeur servant au calage altimétrique de l’altitude de vol depuis la pression au sol d’un aérodrome à proximité. QFE, signifiant « Quelle est la pression atmosphérique au sol ? » dans le code Q ;
QNH : QNH est un code international, qui signifie : « Quelle est la pression atmosphérique, convertie au niveau de la mer selon les conditions de l’atmosphère standard ? » selon le code Q dans un METAR. Cette valeur sert au calage altimétrique de l’altitude de vol d’un aéronef.
QDM : Le QDM est un code qui signifie « Quel est mon relèvement magnétique ? » selon le code Q. Route à suivre pour rejoindre un aérodrome, donnée par l’aérodrome.
ATS : les services de la circulation aérienne, autrement appelés services de la CA ou services ATS (ATS pour Air Traffic Services) désignent l’ensemble des services assurés par un organisme de la circulation aérienne afin de participer à la sécurité des vols. Ils sont au nombre de trois :
- le service de contrôle : Régule la circulation aérienne et prévient abordages et collisions
- le service d’information de vol : Donne les informations concernant les conditions de vol.
- le service d’alerte : Prévient les organismes compétents en cas d’urgence.
SAR : Search and rescue
Système d’aéronef télépiloté (RPAS) : ensemble des composants nécessaires à la conception et à l’utilisation standard d’un aéronef (drone, liaisons de commande, poste de commande, etc.)
VFR : règles de vol à vue, Visual flight rules, nom anglais de « Vol à vue », un régime de vol pour les avions.
VMC : Visual meteorological conditions, les conditions météorologiques de vol à vue,
8.6 – Alphabet international
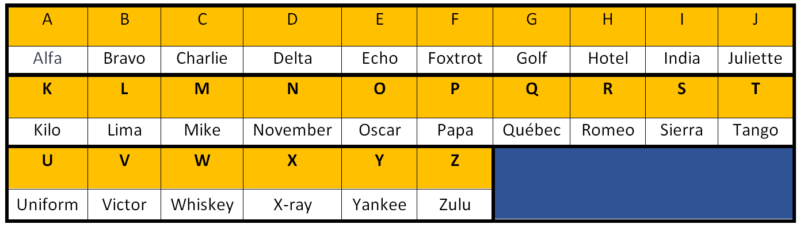
Dans l’usage, chaque chiffre est donné de façon indépendante :
- cap 050 : zéro cinq zéro
Pour une heure, seules les minutes sont transmises
- 07h09 : zéro neuf
Pour un altitude, nombres entiers de centaines ou de milles
- 800 : huit cent
- 14 000 : quatorze mille
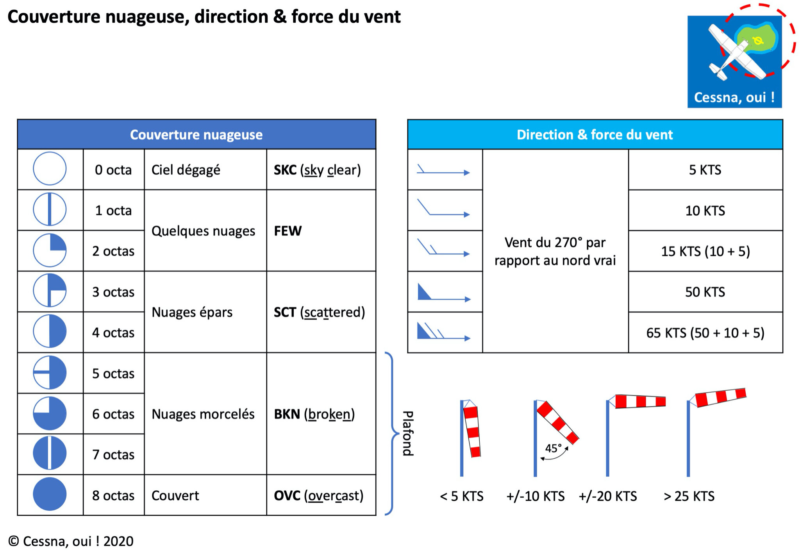
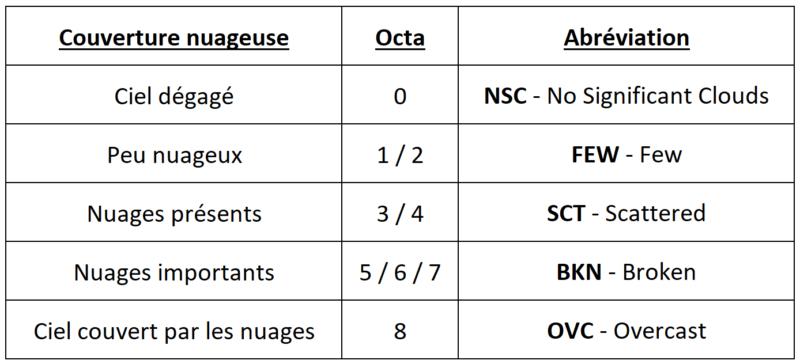
8.7 – Transmission d’information météorologique
La couverture nuageuse du ciel s’apprécie en 8ème, et l’unité est l’octa
8.8 – Messages d’urgence et de détresse
Un message de détresse est employé lorsque le télépilote rencontre une menace de danger grave ou imminent accompagné d’une demande d’aide immédiate. Ces messages sont indiqués par la prononciation des mots « MAYDAY MAYDAY MAYDAY«
Le menace d’urgence n’implique pas une aide immédiate mais concerne tout de même la sécurité de personne ou de véhicule. Ces messages sont indiqués par la prononciation des mots « PANPAN PANPAN PANPAN« . La fréquence internationale d’urgence est de 121.5 Mhz
Les aéronefs habités disposent de balises de détresse pour reconnaitre la balise et son emplacement. la bande de ces balises est de 406 ou 406.1 Mhz
Echelle de lisibilité :
- 5 : parfaitement lisible
- 4 : lisible
- 3 : lisible, difficilement
- 2 – lisible par instants
- 1 – illisible
QCM
Un message météorologique provenant des services de la circulation aérienne délivre des données concernant : Des renseignements sur une situation actuelle ou à venir.
Un METAR vous donne une information de nébulosité « Broken », cela correspond a une couverture nuageuse de : 5 à 7 octas.
Comment transmettre l’information d’un cap 050° et une altitude de 200ft ? Cap zéro cinq zéro, altitude deux cents.
Quel code Q doit être utilisé pour indiquer l’altitude d’un aéronef télépiloté ? QNH.
- QFE: Ce code exprime une valeur servant au calage altimétrique de la hauteur de vol d’un aéronef depuis la pression au sol connue pour un aérodrome à proximité.
- QNH: Ce code exprime une valeur servant au calage altimétrique de l’altitude de vol d’un aéronef.
- QDM : Route à suivre donnée par l’aérodrome et permettant de le rejoindre.
Comment transmettre l’information d’un cap 180° et une altitude de 100ft ? Cap unité huit zéro, altitude cent.
Quel code Q doit être utilisé par l’aérodrome pour indiquer au pilote d’un aéronef la route permettant de le rejoindre ? QDM. Il indique la direction dans laquelle pointe la piste par rapport à l’aimant terrestre.
Comment est nommé le message informant d’un danger grave et imminent rendant nécessaire de l’aide au plus vite : Un message de détresse.
Un METAR vous donne une information de nébulosité ‘OVC’, cela correspond à une couverture nuageuse de : 8 octas.
Lorsqu’aucune confusion n’est possible sur l’heure, comment indiquer qu’il est 07h08 ? Zéro huit.
Que signifie « CAVOK » dans un rapport météorologique ? Absence de nuage jusqu’à 5000 ft et visibilité supérieure à 10 km. CAVOK (Ceiling And Visibility OK ou Cloud And Visibility OK)
Quel code Q doit être utilisé pour indiquer à un aéronef sa hauteur par rapport à une station sol ? QFE.
Quel terme permet au pilote d’aéronef de signaler une menace de danger grave et imminent avec besoin d’une assistance immédiate ? MAYDAY, MAYDAY, MAYDAY.
Un message d’information provenant des services de la circulation aérienne délivre des données concernant : Les conditions de vols.
Comment est nommé le message informant d’un risque impliquant la sécurité de personne mais ne nécessitant pas une aide immédiate ? Un message d’urgence.
Que signifie le message ‘touch and go’ transmis d’un aéronef en vol : Il annonce qu’il redécollera immédiatement après son atterrissage sur l’aérodrome.
Quel code Q doit être utilisé pour indiquer l’altitude d’un aéronef télépiloté ? QNH.
Sélectionnez la bonne signification de l’abréviation AIP : Publication d’Information Aéronautique.
Pour rejoindre un aérodrome, vous devrez utiliser le code Q suivant : QDM.
Quel phénomène cause la perte de la réception du signal suite à une action malveillante et volontaire d’un tiers ? Le brouillage.
Quel est le phénomène correspondant à une déviation de l’onde du poste de télépilotage suite à un changement d’atmosphère rencontrée par l’onde : La réfraction.
Quelle est la vitesse instantanée fournie par un GPS embarqué ? La vitesse sol.
Quel est le phénomène causant une baisse de réception du signal radio par le drone à cause de sa diffusion à travers une petite ouverture ? La diffraction.
Quelle proposition décrit correctement l’interférence d’une onde électromagnétique par une autre onde électromagnétique ? L’interférence.
La couverture du système de navigation NAVSTAR couvre : L’ensemble du globe. Environ 24 à 32 satellites en fonctionnement à tout moment, répartis sur plusieurs orbites de manière à ce qu’au moins quatre satellites soient visibles depuis n’importe quel point de la surface de la Terre à tout moment.
La fréquence utilisée pour la commande et le contrôle de l’aéronef est : 2,4 GHz.
La vitesse de déplacement des ondes électromagnétique est : La vitesse de la lumière.
Le bon fonctionnement d’un système GPS peut être perturbé par : 3 – l’absence d’antenne sur l’aéronef 4 – le dysfonctionnement de l’horloge d’un satellite 5 – la présence de relief important
Indiquez le nombre de satellites, d’orbites et l’altitude du système NAVSTAR : 24 – 6 – 20200 kilomètres.
Quelle est la bande de fréquence utilisée pour la transmission vidéo entre une station de vol et un aéronef télépiloté ? SHF.
Votre GPS présente des indications de type « waypoint », de quoi s’agit-il ? De points de route déjà créés dans la base de données par l’utilisateur. Un waypoint (ou point de route) est une référence de position géographique dans le système GPS. En d’autres termes, c’est un point spécifique sur une carte que vous pouvez utiliser comme référence ou comme destination. Les waypoints sont généralement utilisés dans le cadre de la navigation pour aider à définir et à suivre un itinéraire spécifique.
Sélectionnez la proposition correspondant à un cycle de diffusion d’une onde : La communication de l’ensemble des informations sur un unique cycle de transmission.
Quelles informations sont délivrées en simultané lors de la captation de 4 satellites par le GPS de l’aéronef ? L’heure, la longitude, la latitude, l’altitude.
A quoi correspond l’amplitude d’une onde électromagnétique ? L’écart maximum d’une oscillation.
Quelle fréquence est utilisée pour le guidage d’un aéronef télépiloté depuis une station au sol ? 2,4 GHz.
La vitesse de diffusion d’une onde électromagnétiques est de : 300 000 km/s.
Quel phénomène cause la baisse de la réception du signal lors de l’éloignement d’un aéronef ? L’atténuation. Les ondes radio se dispersent et perdent de leur énergie au fur et à mesure qu’elles parcourent une distance plus grande.
Sélectionnez la bonne proposition concernant la détection de satellites du système NAVSTAR :
Elle est évolutive et dépend de l’heure et de la position de l’observateur. La détection de ces satellites par un récepteur GPS dépend effectivement de plusieurs facteurs, notamment l’heure et la position de l’observateur. La détection des satellites du système NAVSTAR est évolutive : elle change avec le temps et varie en fonction de l’endroit où vous vous trouvez sur la Terre.
Quel angle est désigné par l’utilisation du mot « inclinaison » dans le cadre de la navigation par satellite ? L’angle entre le plan orbital et l’équateur. Une inclinaison de 0 degré signifie que l’orbite du satellite est exactement alignée avec l’équateur, tandis qu’une inclinaison de 90 degrés signifie que l’orbite du satellite est perpendiculaire à l’équateur, donc polaire. L’inclinaison orbitale a une influence significative sur la couverture terrestre du satellite.
Quelle est la bande de fréquence utilisée entre une radicommande et un aéronef télépiloté ? UHF.
Quelles sont les informations fournies par un GPS ? Un GPS donne les informations X,Y,Z ainsi qu’une vitesse sol et un temps précis.
L’information principale donnée par un GPS est : La position géographique. Le processus est basé sur une méthode appelée « triangulation » qui utilise le temps qu’il faut à un signal pour voyager d’un satellite au récepteur GPS. Comme nous connaissons la vitesse à laquelle le signal voyage (la vitesse de la lumière), nous pouvons calculer la distance entre le satellite et le récepteur. En recevant les signaux de plusieurs satellites à la fois, le récepteur GPS peut calculer sa position exacte.
Quelle est la hauteur calculée par le système satellite NAVSTAR ? La hauteur basée sur l’ellipsoïde WGS-84.
Sélectionnez la bonne définition de l’amplitude d’une onde : La distance maximale de l’oscillation de l’onde.
Sélectionnez la bonne définition de la fréquence d’une onde : Le nombre de cycles réalisés par l’onde en une seconde.
Sélectionnez l’inclinaison de l’orbite des satellites du système NAVSTAR : 55° par rapport à l’équateur.
Quelle est l’information délivrée par les éphémérides contenues dans un message GPS ? La position du satellite concerné. Les éphémérides présentes dans un message GPS fournissent des informations sur la position précise du satellite concerné à un moment donné. Ces données sont essentielles pour permettre au récepteur GPS de calculer sa propre position sur la Terre avec précision. Plus précisément, les éphémérides contiennent les informations suivantes : – La position précise du satellite à un moment donné. – La vitesse du satellite et sa direction de déplacement. – Les perturbations potentielles qui pourraient affecter la trajectoire du satellite, comme la gravité de la Terre, la pression solaire, etc. – L’heure à laquelle ces informations ont été calculées. – L’inclinaison de l’orbite du satellite par rapport à l’équateur terrestre.
Quelles sont les informations fournies par les satellites du système GPS : 1 – les éphémérides, 2 – l’état du système GPS, 3 – le décalage horaire de l’heure UTC, 5 – le retard ionosphérique.
Sélectionnez la plage de fréquence des ondes UHF : 300 MHz – 3000 MHz.
Quels sont les facteurs pouvant causer une variation d’orbite d’un satellite ? Sélectionnez la réponse la plus complète : Le vent solaire, la gravité du soleil, de la lune et des planètes.
Quels sont les trois éléments composant un système de navigation GNSS ? Il s’agit des stations de contrôle, des satellites et des récepteurs.
Quel type d’horloge est utilisé pour les satellites GPS NAVSTAR ? Atomique. Les horloges atomiques utilisent les vibrations des atomes pour mesurer le temps avec une précision extraordinaire. Dans le cas des horloges GPS, elles se basent sur les vibrations des atomes de césium ou de rubidium. L’oscillation de ces atomes est si régulière qu’elle permet une mesure du temps incroyablement précise, avec une marge d’erreur de quelques milliardièmes de seconde.
Sélectionnez la proposition définissant la fréquence d’une onde : Exprimée en Hz, c’est le nombre de cycle réalisé par l’onde en une seconde.
Sélectionnez la bonne définition de la longueur d’onde : La distance parcourue par l’onde pendant un cycle de transmission.
Combien de satellites sont requis par le système NAVSTAR pour le calcul d’une position et de la vitesse d’évolution de l’aéronef ? 4.
Sélectionnez les composantes d’une onde électromagnétique : Une composante magnétique (H) et une composante électrique (E).
Quelle est la fréquence de transmission vidéo entre un aéronef télépiloté et une station de vol ? 5,8 GHz.
Sélectionnez la plage de fréquence des ondes VHF : 30 MHz – 300 MHz.
Sélectionnez la proposition définissant l’unité Hertz (Hz) : Un Hz correspond au nombre d’oscillations en une seconde.
Quelle est la puissance maximale d’émission d’une onde électromagnétique en France ? 100 mW.
A quoi correspond le phénomène appelé « fading » ? Une interférence entre une onde de ciel et une onde de sol. Lorsqu’une onde électromagnétique se propage dans l’atmosphère, elle peut être réfléchie par la surface de la Terre (onde de sol) ou par la couche ionisée de l’atmosphère (onde de ciel). Lorsque ces deux ondes se superposent, elles peuvent créer des interférences, ce qui entraîne des variations de la force du signal reçu.
Concernant les systèmes de positionnement par satellite GLONASS/GALILEO/NAVSTAR, sélectionnez la bonne proposition : Ils fournissent une position à partir de mesures temporelles.
Le point d’aboutissement sur un aérodrome, est le point : d’intersection de la piste et de la trajectoire de descente nominale d’un aéronef.
« Trajet spécifié que les aéronefs doivent suivre lorsqu’ils volent aux abords d’un aérodrome », cette définition correspond : au circuit d’aérodrome.
Le sigle SAR indique qu’il s’agit d’un service de : de recherche et de sauvetage.
Vous entendez le message météorologique suivant : « vent deux zéro zéro degrés deux cinq noeuds ». Cela indique que le vent est du : 200° pour une vitesse de 25 noeuds.
Les services météorologiques d’un aérodrome signalent l’arrivée de la brume sur un aéroport, vous évoluez à proximité, vous considérez que la visibilité va bientôt être : comprise entre 1 km et 5 km.
Vous écoutez la transmission des données météorologiques d’un aérodrome, on annonce un QFE de 1001 hPa. Cela signifie que : la pression au niveau du terrain est de 1001 hPa.
Vous effectuez une mission avec votre aéronef sans équipage à bord à proximité d’un aérodrome. En écoutant la fréquence de la tour de contrôle, vous entendez un aéronef indiquant qu’il va rejoindre « la branche vent arrière », vous pouvez vous attendre à ce que cet aéronef : s’aligne parallèlement à la piste, à droite ou à gauche de celle-ci, dans le sens inverse de son atterrissage.
Une région de contrôle, ou portion de région de contrôle, présentant la forme d’un couloir, est : une voie aérienne.
« La projection à la surface de la terre de la trajectoire d’un aéronef, trajectoire dont l’orientation, en un point quelconque, est généralement exprimée en degrés par rapport au nord », cette définition correspond : à la route.
En écoutant une fréquence ATIS, vous obtenez : des renseignements météorologiques et la piste en service sur le terrain concerné.
Un espace aérien de dimensions définies à l’intérieur duquel le service du contrôle de la circulation aérienne est assuré selon la classification des espaces aériens, est : un espace aérien contrôlé.
Votre aéronef sans équipage à bord va évoluer à une altitude de 1500 mètres dans une zone où vous devrez transmettre cette information à un organisme du contrôle aérien. La façon correcte de transmettre cette altitude est : mille cinq cent mètres. Pour la transmission des nombres utilisés pour la communication de données sur l’altitude, la hauteur des nuages, la visibilité qui contiennent des multiples entiers de cent ou de mille, chaque chiffre du nombre de centaines ou de milliers sera énoncé et le dernier sera suivi, selon le cas, du mot CENT ou du mot MILLE.
Exemple: 800 s’énonce huit cent, 3400 s’énonce trois mille quatre cent, 12000 s’énonce un deux mille.
Un message d’information diffusé par le service mobile aéronautique est un message : concernant la régularité des vols.
Un message météorologique diffusé par le service mobile aéronautique est un message : qui donne des informations sur le temps présent ou à venir.
Un espace aérien contrôlé s’étendant verticalement à partir de la surface jusqu’à une limite supérieure spécifiée, est : une zone de contrôle.
Le terme générique employé pour indiquer la position verticale d’un aéronef en vol et désignant, selon le cas, une hauteur, une altitude ou un niveau de vol, est : le niveau.
Si l’on vous demande de communiquer la hauteur de votre aéronef sans équipage à bord, vous ferez référence au calage exprimé par le code Q suivant : QFE.
– QNH: la pression atmosphérique ramenée au niveau de la mer. Un altimètre indique alors une altitude, le QNH est donné par la station météo de l’aéroport.
– QFE: pression au niveau de l’aérodrome. Ce calage permet de lire zéro pied sur un altimètre quand vous êtes au sol. On vole ensuite à une hauteur par rapport au sol.
« La distance verticale entre un niveau, un point ou un objet assimilé à un point, et la surface du sol ou de l’eau », cette définition correspond à : la hauteur.
« Orientation de l’axe longitudinal d’un aéronef, généralement exprimée en degrés par rapport au nord », cette définition correspond : au cap. Un aéronef, qu’il soit habité ou télépiloté, vole d’un point A à un point B en suivant une route. Mais dès lors qu’il y a du vent (et en l’air c’est souvent le cas), alors pour « rester » sur sa route, l’aéronef devra voler en « contrant » le vent (pour ne pas se faire sortir de la route!). Il suivra alors un cap. On peut illustrer en disant que l’aéronef avance « en crabe », il suit sa route mais son axe longitudinal n’est pas aligné avec la route.
Lorsque le terme « CAVOK » est utilisé dans un rapport d’observation météorologique pour l’aviation, les valeurs de la visibilité et des nuages sont : Visibilité 10 km ou plus, pas de nuage en dessous de 5000 ft/sol.
Ceiling and visibility OK (CAVOK) est un terme météorologique utilisé en aéronautique signifiant :
– visibilité supérieure à 10 km,
– pas de nuage au-dessous du plus élevé des niveaux suivants : la différence entre l’altitude minimale de secteur et l’altitude de l’aérodrome ou 1 500 m (5000 ft) au-dessus de l’Airport Reference Point
– pas de CB (cumulonimbus) ni de TCU (Cumulus Congestus autrement appelé Tower Cumulus), ni de temps significatif.
Vous effectuez une mission avec votre aéronef sans équipage à bord à proximité d’un aérodrome. En écoutant la fréquence de la tour de contrôle, vous entendez un aéronef s’annonçant en « finale ». Cet aéronef : est aligné avec l’axe de la piste, et va atterrir ou effectuer un posé-décollé. Le circuit d’aérodrome est découpé en plusieurs « branches » (sections ou étapes comme vous préférez). Le circuit d’aérodrome est un trajet spécifié que les aéronefs doivent suivre lorsqu’ils volent aux abords d’un aérodrome. Il y a dans l’ordre : montée initiale – vent traversier – vent arrière – base – dernier virage – finale.
Si l’on vous demande de communiquer l’altitude de votre aéronef sans équipage à bord, vous ferez référence au calage exprimé par le code Q suivant : QNH
Vous écoutez la transmission des données météorologiques d’un organisme aéronautique, on annonce un QNH de 1025 hPa. Cela signifie que : la pression atmosphérique ramenée au niveau de la mer est de 1025 hPa. (QNH = mer; QFE = aérodrome)
En écoutant une fréquence ATIS, vous obtenez : des renseignements météorologiques et la piste en service sur le terrain concerné. ATIS (Automatic Terminal Information Service). L’ATIS est une sorte de répondeur téléphonique : un message vocal enregistré par le service météo d’un aéroport est mis à disposition des usagers (pilote et télépilote).
Le terme « altitude », dans le cadre de l’utilisation d’un aéronef sans équipage à bord, correspond à : la distance verticale entre l’aéronef et le niveau moyen de la mer.
Vous écoutez les échanges radio entre un aérodrome voisin et un aéronef habité, vous entendez que le pilote de l’aéronef demande un QDM au contrôleur. Cela signifie que le pilote demande : une route à suivre pour rejoindre l’aérodrome.
Une communication air-sol est définie comme une communication : bilatérale entre un aéronef et une station ou des points au sol.
La première phase d’alerte (SAR) déclenchée au profit d’un aéronef avec lequel on a perdu le contact radio, est nommée : INCERFA. (incertitude dans les 30 minutes), puis ALERFA, et DETRESFA
L’ATIS peut être consulté : par fréquence radio ou éventuellement par téléphone. (c’est un répondeur)
Le terme générique qui désigne, selon le cas, le service d’information de vol, le service d’alerte, le service consultatif de la circulation aérienne, le service du contrôle de la circulation aérienne (contrôle régional, contrôle d’approche ou contrôle d’aérodrome), est : le service de la circulation aérienne (ATS).
La balise de détresse d’un aéronef émet sur la fréquence ? 406 MHz. Les balises de détresse émettent dans la bande 406 à 406,1 MHz et transmettent aux équipes de recherche et de sauvetage, un message numérique codé permettant d’identifier la balise, le propriétaire ou l’exploitant de l’aéronef. Ce message peut indiquer également la position de la balise.
Lors d’une transmission radio, vous entendez que le QFU d’un aérodrome voisin à votre position est le « 25 ». Cela signifie que : la piste 25, d’une direction magnétique d’environ 250°, est en service. Le QFU est un code pour indiquer la piste en service.
Un message de détresse doit contenir le plus grand nombre possible d’éléments ou des détails suivants : L’identification de l’aéronef, la nature du cas de détresse, les intentions du commandant de bord, la position, le niveau de vol (ou l’altitude selon le cas) et le cap.