

2.1 – Le vent
L’interaction du vent avec les relief génère tout type d’écoulement. En fonction de la vitesse du vent et du relief du sol, la « zone perturbée » peut s’étendre à plus ou moins grande hauteur. A faible altitude, le vent est ralenti à cause du frottement du sol et de la viscosité de l’air. Cette zone peut être laminaire ou turbulente.
En dehors des zones de turbulences, l’écoulement est permanent.
Tout obstacle l’écoulement d’un fluide est source de perturbation. Un objet se déplace par rapport à la masse air, la masse air se déplace par rapport à l’objet.
- La vitesse-air et le vent relatif est la vitesse de déplacement de l’objet par rapport à la masse air non perturbé loin devant lui, appelée infini amont.
- Vitesse-air = vitesse d el’objet par rapport à la masse d’air
- Vent relatif = mesurer la vitesse de la masse d’air par rapport à l’objet
- Le vent relatif est la vitesse d’écoulement de l’infini amont par rapport à l’objet
- Ce sont des vecteurs égaux et opposés
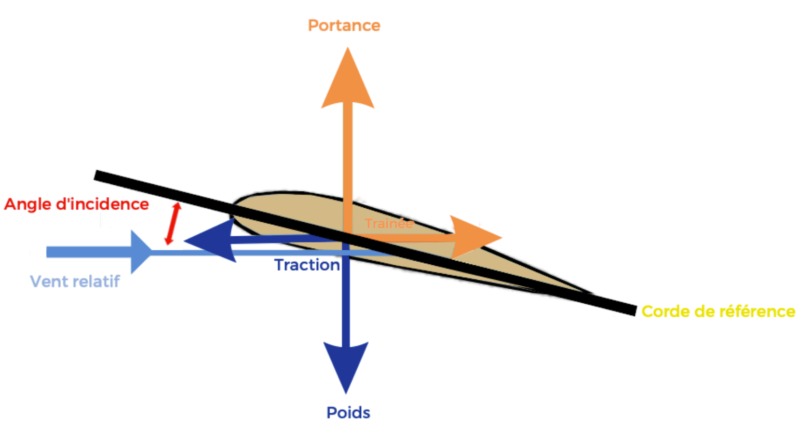
Le mouvement d’une particule d’air découle de l’action des forces extérieures éxercées sur elle.
- forces de pression : s’exercent perpendiculairement à la surface de contact : génère la portance
- Forces de viscosité s’exercent parallèlement à la surface de contact : génère la trainée
- Lorsque l’incidence augmente, la portance augmente jusqu’au décrochage, où la portance diminue brusquement.
Sur une pale de rotor, le vent relatif fait apparaitre une suppression sur l’intrados et une dépression sur l’extrados, créant une portance rotor perpendiculaire au plan de rotation.
Plus la densité est faible, plus la puissance nécessaire est grande. La théorie de Froude montre que la puissance nécessaire au vol stationnaire augmente lorsque la densité de l’air diminue.
- le rotor exerce sur l’air une force vers le bas
- l’air exerce sur le rotor une force égale et opposé
- c’est la portance rotor
Sur un drone à voilure fixe, la portance est perpendiculaire à la vitesse-air. La trainée du drone est parallèle à la vitesse-air.
2.2 – Aérodynamique : Concepts de base, lois et définitions
2.1 – Résultante aérodynamique
C’est la somme vectorielle de toutes les forces aérodynamiques qui agissent sur un avion. Elle est établie en fonction de la portance et de la trainée.
La portance : force qui soutient l’avion dans les airs
Trainée : resistance à l’avancement de l’avion dans l’air
Résultante aérodynamique : somme vectorielle de ces 2 forces, équilibre entre la portance et la trainée
2.2 – Portance
Force qui maintient un avion en l’air. Générée par la forme et la vitesse de l’aile, qui cré une différence de pression entre le dessus et le dessous de l’aile. La pression est plus faible sur le dessus de l’aile et plus élevée en dessous, ce qui crée une force ascensionnelle qui maintient l’avion en l’air.
2.3 – Traînée
Résistance à l’avancement de l’air qui se manifeste lorsque l’avion se déplace à travers l’atmosphère. Causée par la friction de l’air sur la surface de l’avion, ainsi que par la perturbation de l’air créée par les différentes parties de l’avion, comme les ailes, les moteurs, les fuselages.
Plus l’avion est grand et plus sa surface est rugueuse, plus la trainée sera importante. Pour minimiser la trainée, les avions sont conçus de manière à réduire la friction de l’air à al surface de l’avion, et à rendre les formes aérodynamiques de l’avion aussi lisses et efficaces que possible.
2.4 – Angle d’incidence
Angle formé entre la ligne d’axe longitudinal de l’avion et la ligne d’attaque de l’aile, c’est à dire l’angle formé entre la direction du vol de l’avion et la surface supérieure de l’aile. L’angle d’incidence est réglé par le constructeur de l’avion et permet de déterminer la portance générée par les ailes. un angle trop important peut causer une déstabilisation de l’avion, et un angle insuffisant peut entraîner une perte de portance.
L’angle d’incidence peut être également ajusté par le pilote lors des manœuvres de décollage ou d’atterrissage pour optimiser la performance de l’avion.
Pour un aéronef à voilure fixe (type « avion » ou « planeur »), lorsque le facteur de charge augmente, la vitesse de décrochage augmente, mais l’incidence de décrochage ne change pas. En vol en palier stabilisé, le poids est égal à la portance : G=Portance/poids=1. En virage ou lors d’une ressource, le facteur de charge augmente, et si on impose un facteur de charge trop fort, par exemple en serrant excessivement un virage avec une vitesse élevée, on peut atteindre les limites de résistance de l’appareil, les ailes peuvent se briser.
A retenir : l’incidence de décrochage est une valeur fixe pour un profil d’aile donné.
La vitesse de décrochage est influencée par le facteur de charge, la masse, la configuration de l’avion.
3 – Hélices – Rotors
3.1 – Conversion du couple moteur en force de traction (ou poussée)
La conversion du couple moteur en force de traction d’une hélice se fait en utilisant la mécanique des fluides. Lorsque le moteur produit un couple, il fait tourner l’hélice, qui, à son tour, produit une force de propulsion en poussant de l’air ou de l’eau à l’arrière du véhicule.
La vitesse de rotation de l’hélice déterminée par le couple moteur, a un impact direct sur la quantité d’air ou d’eau poussée, ce qui se traduit par une variation de la force de propulsion. plus l’hélice tourne rapidement, plus elle pousse de l’air ou de l’eau, ce qui entraîne une augmentation de la force de propulsion.
3.2 – Moments et couples dus au fonctionnement de l’hélice/rotor :
Un MOMENT est une force qui agit sur un objet pour le faire tourner autour d’un axe.
Un COUPLE est une combinaison de deux forces qui agissent sur un objet pour le faire tourner autour d’un axe.
L’hélice en tournant exerce des forces sur l’air qui l’entoure. Ces forces créent des MOMENTS et des COUPLES qui agissent sur l’avion pour le faire tourner autour de ses différents axes. Les MOMENTS et les COUPLES sont importants pour la stabilité et la maniabilité de l’avion.
4 – Les différents axes de rotation
3 axes principaux :
- Longitudinal : traverse l’avion d’avant en arrière : mouvement de roulis
- Latéral : d’u côté à l’autre : mouvement de tangage
- vertical : de haut en bas, perpendiculaire aux 2 autres : mouvement de lacet
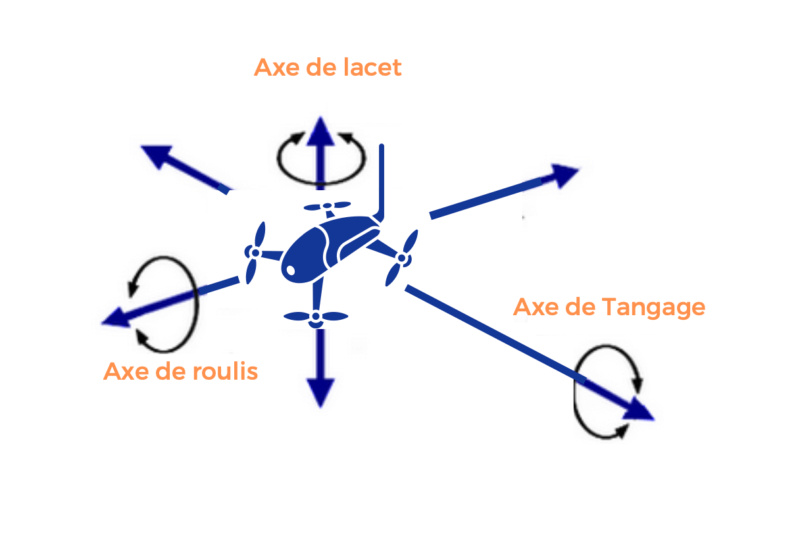
4.1 – Mouvements d’un drone multirotor
4.1.1 – Roulis
Vitesse des moteurs d’un coté réduite ou augmentée par rapport à ceux de l’autre côté autour de l’axe longitudinal. Ex : roulis vers la gauche : vitesse des moteurs à gauche réduite et celle des moteurs a droite augmentée
4.1.2 – Tangage
Vitesse des moteurs de l’avant ou l’arrière réduite ou augmentée par rapport à ceux de l’autre côté autour de l’axe latéral. Ex : tangage vers l’avant : vitesse des moteurs avant réduite et celle des moteurs arrières augmentée
4.1.3 – Lacet
Vitesse des moteurs réduite ou augmentée autour de l’axe vertical de manière a créer un couple de rotation. Ex : augmenter la vitesse des moteurs tournant en CW et réduire la vitesse des moteurs CCW
4.2 – Connaissances basiques pour les voilures tournantes et fixes
4.2.1 – Vol rectiligne horizontal stabilisé
Vol rectiligne horizontal stabilisé = vol courant, trajectoire constante et stable. -> angle d’incidence nul ou proche de zéro
Angle d’incidence formé entre ligne d’air (trajectoire suivie par l’avion) et ligne de référence (surface intérieure de l’aile).
Les forces :
- Portance
- Traînée
- Poussée
- Poids
4.2.2 – Montée rectiligne stabilisée
Angle d’incidence maintenu à un niveau constant, avec les mêmes forces. La somme des forces est égale à la gravité agissant sur l’aéronef
4.2.3 – Vol stationnaire
Angle d’incidence formé par la direction relative de l’air et la surface d’attaque. Forces = portance, trainée, poussée, poids
Vol stationnaire = somme des forces égales au poids de l’appareil
5 – Masse du drone et limitations de masse
5.1 – Masse et centrage
Les performances d’un aéronef dépendent de la masse et du centrage.
Masse = quantité totale de matière qui compose l’aéronef, y compris passagers, bagages, etc..
Centrage (ou centre de gravité) = emplacement du centre de gravité de l’aéronef par rapport à sa structure, là où les forces de gravité sont équilibrées.
Masse et centrage doivent être maintenus dans les limites définies, en calculant la performance de l’aéronef avec les informations de charge de vol.
5.1.1 – Limite de masse et centrage
Ce sont les limites spécifiées par le constructeur , qui considère l’aéronef en sécurité et capable de fonctionner de manière optimale.
Les limites de masse = masse maximum au décollage, et masse maximum à l’atterrissage. Il existe aussi la masse maximale à vide.
Les limites de centrage = avant et arrière
Limites de charge utile = quantité maximale de poids que l’aéronef peut transporter en sécurité.
5.1.2 – Limites du centre de gravité
Zone où le centre de gravité de l’aéronef doit se trouver pour assure run bon fonctionnement sûr. Les forces de pesanteur sont équilibrées. Elles sont exprimées en termes de plage de position du centre de gravité, définie en termes de distance à partir de l’avant de l’aéronef, soit cg en %MAC. C’est le pourcentage de la longueur de l’aile, qui est le pourcentage de la distance entre le bord d’attaque et le bord de fuite de l’aile. Le CG doit être maintenu dans ces limites.
5.2.3 – Détermination du centrage
Centre de gravité longitudinal (CG) = (Moment longitudinal total / masse totale)
Une fois la position déterminée, on compare avec les données constructeur, exprimée en pourcentage de la longueur de l’aile ou en distance entre les trains d’atterrissage. Si le centre de gravité est en dehors des plages autorisées, il faut déplacer ou ajuster la charge utile.
Exemple :
Aéronef a une masse total de 5 000kg.
Le moment longitudinal total est de 120 000 kg.m
Le moment total est de 80 000 kg.m
Calculons le CG Longitudinal : (120 000 / 5 000) = 24 mètres en arrière de l’aile.
Il faut ensuite comparer avec les limites constructeur.
5.1.4 – Les effets de la position du centre de gravité
Pour les aéronefs de centrage avant et arrière.
Le centrage avant :
- plus grande stabilité de l’aéronef
- plus grande cnosommationd e carburant
- moins bonne maniabilité
Le centrage arrière :
- moins bonne stabilité
- plus faible consommation
- meilleure maniabilité
En cas d’augmentation de la charge utile, il faut préserver le centre de gravité, et surtout prendre en compte les contraintes physiques du drone pour ne pas le surcharger. Les limites de charge sont indiquées, et les testes de résistance préalable sont nécessaires.
Le drone subit différentes forces :
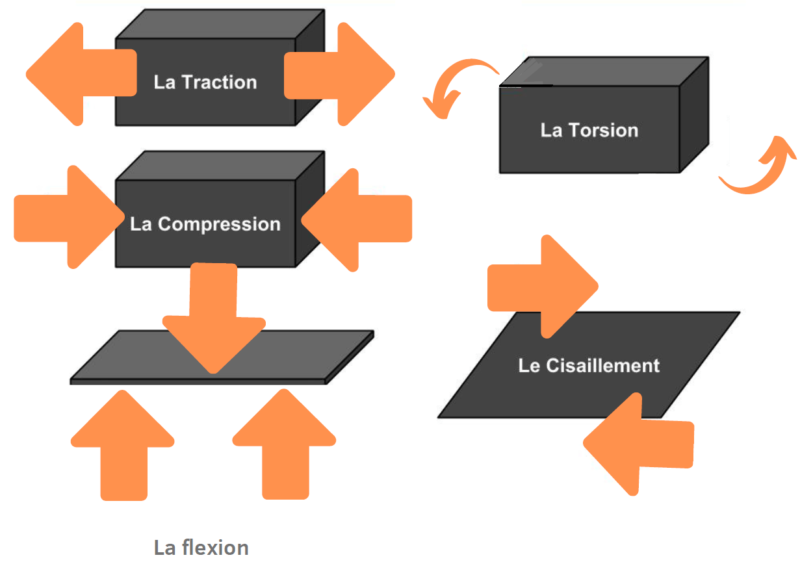
Ces forces augmentent en fonction du poids et des accélérations. Elles sont mesurées en Newton, représentées par des vecteurs disposant d’un sens, d’une intensité et de points d’application.
5.2 – Termes techniques concernant la masse de l’aéronef
Moment de force : mouvement généré par une force par rapport à un point de référence
Masse maximale : poids maximum de l’aéronef (masse possible ou légale)
Masse en ordre de fonctionnement : poids de l’aéronef au décollage avec les équipements nécessaires
Masse à vide : poids de l’aéronef sans charge utile, comprenant uniquement les hélices, le moteur, la radio, le GPS et électronique non accessoire, batteries
Plage de masse : masse maximale avec les équipements déclarés sur le site AlphaTango. On peut être en dessous de la masse d’enregistrement, mais pas au-dessus.
Charge utile : ensemble des appareils embarqués et accessoires nécessaires à la mission. C’est la masse au décollage mois le masse à vide.
Les types d’équilibres :
- équilibe neutre : l’aéronef se stabilise dans sa nouvelle position
- équilibre instable : éloignement de l’aéronef avec son point d’origine
- équilibre stable : aéronef revient dans sa position intiale
QCM
Pour quelle raison une hélice a-t-elle un angle de calage qui évolue entre son moyeu et son extrémité ?
Obtenir une répartition homogène de la portance sur toute sa longueur. La raison de cette variation est liée à la façon dont l’hélice se déplace à travers l’air. À mesure que l’hélice tourne, chaque point le long de la longueur de l’hélice se déplace à une vitesse différente. Près du moyeu, la vitesse est relativement faible, alors qu’à l’extrémité de l’hélice, la vitesse est beaucoup plus élevée en raison de la plus grande distance que ce point parcourt pour chaque rotation de l’hélice. Si l’angle de calage était le même sur toute la longueur de l’hélice, cela créerait une distribution inégale de la portance le long de l’hélice, avec moins de portance près du moyeu et plus à l’extrémité. Cela pourrait rendre l’hélice inefficace et même instable. En faisant varier l’angle de calage le long de l’hélice, les concepteurs peuvent s’assurer que chaque partie de l’hélice génère une quantité de portance proportionnelle à sa vitesse, ce qui crée une distribution plus homogène de la portance sur toute la longueur de l’hélice. Cela permet une utilisation plus efficace de la puissance disponible et améliore la stabilité et la performance de l’hélice.
Quel est le mouvement réalisé par un aéronef lors d’une évolution sur l’axe de roulis ? Mouvement de rotation autour de l’axe longitudinal de l’aéronef.
Quel mouvement de l’aéronef est réalisé autour de son axe longitudinal ? le mouvement de roulis.
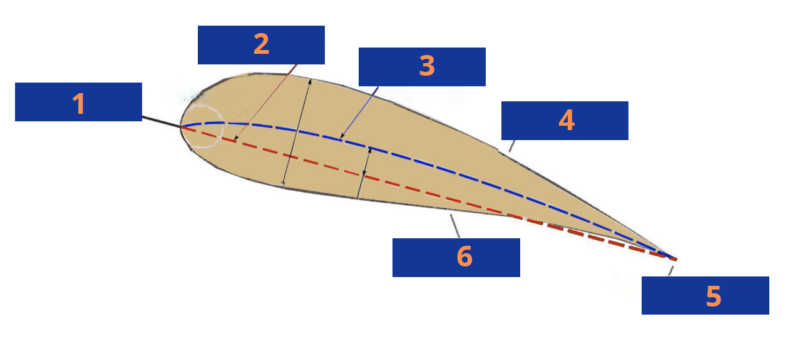
Sélectionnez la proposition correspondant au nom de la composante du profil d’aile portant le numéro 5 : Le bord de fuite.
Sélectionnez la proposition correspondant au nom de la composante du profil d’aile portant le numéro 6 : L’intrados.
Sélectionnez la proposition correspondant au nom de la composante du profil d’aile portant le numéro 4 : L’extrados.
Sélectionnez la proposition correspondant au nom de la composante du profil d’aile portant le numéro 1 : Le bord d’attaque.
Sélectionnez la proposition correspondant au nom de la composante du profil d’aile portant le numéro 2 : La corde.
Sélectionnez la proposition correspondant au nom de la composante du profil d’aile portant le numéro 3 : La ligne de cambrure.
Indiquez où se situe la vitesse d’écoulement la plus importante autour d’un profil de l’aile : Elle est sur l’extrados (4). La vitesse d’écoulement la plus importante se situe effectivement sur l’extrados, c’est-à-dire la surface supérieure de l’aile. Cela est dû à la forme de l’aile, qui est conçue de telle sorte que l’air se déplace plus rapidement sur l’extrados que sur l’intrados, la surface inférieure.
Concernant la résultante aérodynamique, on peut dire que la portance : Évolue perpendiculairement au vent relatif. La portance est une force aérodynamique qui agit perpendiculairement au vent relatif (la vitesse et la direction de l’air par rapport à l’aéronef). Cette force est créée par la différence de pression entre le dessus (extrados) et le dessous (intrados) de l’aile de l’aéronef.
Comment réaliser un roulis à gauche sur votre aéronef de type multi-rotor : Les moteurs de gauche doivent tourner moins vite que les moteurs de droite. Vous devez augmenter la portance du côté droite (en augmentant la vitesse de rotation des hélices) et diminuer la portance du côté gauche (en diminuant la vitesse de rotation des hélices).
En cas d’augmentation de la vitesse d’un aéronef de type avion, la sensibilité des commandes de vol : Augmentera. Dans le cas d’un avion, la sensibilité des commandes de vol tend à augmenter avec la vitesse. Cela est dû à la manière dont la portance et la traînée (les deux forces principales qui agissent sur un avion en vol) changent avec la vitesse. Lorsqu’un avion vole plus vite, l’air circule sur les ailes à une vitesse plus élevée, ce qui augmente la portance. Puisque les commandes de vol fonctionnent en modifiant le flux d’air sur les ailes (par exemple, en levant ou en abaissant les ailerons), une vitesse d’air plus élevée signifie que ces modifications auront un effet plus important, rendant les commandes plus sensibles
L’élévation dans les airs d’un aérodyne est possible grâce à : Des forces aérodynamiques.
À altitude constante, comment évolue la portance lorsqu’un planeur passe d’un vol en virage à un vol en ligne droite ? La portance diminue. Lorsqu’un aéronef vire, il doit générer une portance supplémentaire pour maintenir l’altitude tout en tournant. Cela est souvent réalisé en augmentant l’angle d’attaque de l’aile ou en augmentant la vitesse de l’aéronef.
Comment évolue l’écoulement de l’air d’un aéronef de type multirotor effectuant un vol stationnaire : L’écoulement se fait au niveau des rotors, du haut vers le bas.
- Les rotors (ou hélices) de l’aéronef tournent à grande vitesse. Cela crée une différence de pression entre le dessus et le dessous des rotors.
- Au-dessus des rotors, l’air est à pression atmosphérique normale. En dessous des rotors, la pression est réduite à cause de la force centrifuge générée par les rotors en rotation.
- Cette différence de pression crée une force ascensionnelle qui permet à l’aéronef de voler. Pour cela, l’air doit être déplacé du haut vers le bas, créant ainsi un écoulement d’air à travers les rotors.
- En vol stationnaire, cet écoulement d’air est relativement stable, avec l’air entrant principalement par le dessus des rotors et sortant par le dessous.
Lors d’un vol horizontal à vitesse constante, on sait que : La portance équilibre le poids. Lorsqu’un aéronef vole de manière horizontale à vitesse constante, ces deux forces, la portance et le poids, sont en équilibre. C’est ce qui permet à l’aéronef de maintenir une altitude constante sans monter ni descendre.
Qu’est ce qui est nécessaire pour faire évoluer un aéronef télépiloté de type ‘multirotor’ vers l’avant ? De diminuer la vitesse de rotation des rotors avant. Pour initier un tangage avant vous devez augmenter la portance à l’arrière (en augmentant la vitesse de rotation des hélices) et diminuer la portance à l’avant (en diminuant la vitesse de rotation des hélices).
Vous volez en air calme sans vent, la finesse de votre aéronef correspond au rapport : Distance parcourue / hauteur perdue. La finesse d’un aéronef est une mesure de son efficacité aérodynamique et de sa capacité à maintenir sa vitesse et son altitude. Elle est généralement exprimée sous la forme d’un rapport, représentant la distance horizontale parcourue par rapport à la hauteur perdue.
La résistance de l’air est proportionnelle : Au carré de la vitesse. La traînée aérodynamique, ou résistance de l’air, est une force qui s’oppose au mouvement de l’aéronef. Elle est générée par la friction et la différence de pression entre l’avant et l’arrière de l’aéronef. Cette force augmente de manière quadratique, c’est-à-dire proportionnelle au carré de la vitesse.
La diminution de l’angle d’incidence provoque : La diminution de la traînée. Plus l’angle diminue, plus la portance et la traînée diminuent, si l’angle d’incidence augmente, la portance et la trainée augmenteront.
L’augmentation de l’angle d’incidence provoque : L’augmentation de la traînée.
La gouverne de profondeur de votre aéronef est levée, votre aéronef a une tendance à : Cabrer.
Que se passe-t-il lors de la montée en altitude de l’aéronef : La densité de l’air diminue et fait diminuer la portance et la traînée. Lorsqu’un aéronef monte en altitude, il rencontre une densité d’air plus faible. Cela est dû au fait que l’air devient moins dense avec l’altitude à cause de la diminution de la pression atmosphérique.
Concernant la résultante aérodynamique, on peut dire que la trainée : Évolue parallèlement au vent relatif. Elle s’oppose toujours à la direction de la vitesse de l’aéronef par rapport à l’air, que l’on appelle le vent relatif.
Sélectionnez les deux types d’écoulement de l’air autour d’un aéronef : L’écoulement laminaire ou turbulent. En mécanique des fluides, l’écoulement laminaire est le mode d’écoulement d’un fluide où l’ensemble du fluide s’écoule plus ou moins dans la même direction, sans que les différences locales se contrarient (par opposition au régime turbulent, fait de tourbillons qui se contrarient mutuellement).
Le vent relatif est : Parallèle à la trajectoire. Le vent relatif est le vent que vous ressentiriez si vous étiez à bord de l’aéronef, et il est toujours ressenti comme venant de face, car l’aéronef se déplace à travers l’air. Il est donc considéré comme étant parallèle à la trajectoire de l’aéronef.
Quand un aéronef évolue autour de son axe vertical, il s’agit de l’axe : De lacet.
Sélectionnez la bonne définition de la finesse : Il s’agit de l’équilibre entre la portance et la traînée. La finesse est corrélée à l’allongement de la pâle ou de l’aile.
Comment évolue un aéronef de type multirotor qui accélère : Il pique en inclinant son nez vers le bas. Pour accélérer, un drone multirotor pique en inclinant son nez vers le bas, ce qui redirige une partie de la portance vers l’avant et crée une force de poussée qui fait avancer le drone.
L’efficience d’une hélice est définie par le ratio : Puissance utile / puissance absorbée (cinétique). L’efficience (ou rendement) d’une hélice d’aéronef est une mesure de la capacité de cette hélice à convertir la puissance mécanique qu’elle reçoit en puissance propulsive utile. Cette efficience est généralement définie par le ratio entre la puissance utile (la puissance réellement utilisée pour propulser l’aéronef) et la puissance absorbée (la puissance totale délivrée à l’hélice par le moteur).
L’incidence d’une aile est : L’angle entre la direction du vent relatif et la corde de profil de l’aile.
Lorsque la vitesse d’un aéronef augmente : La portance augmente. Lorsqu’il y a une augmentation de la vitesse et du vent relatif sur un profil d’une aile, les forces de portance et de traînée augmentent car la pression sur l’intrados de l’aile s’intensifie.
Que se passe-t-il lorsqu’on augmente la masse d’un avion ? La vitesse de décrochage augmente.
Les références présentes sur une hélices donnent les informations de : Diamètre et de pas. Le diamètre de l’hélice et le pas de l’hélice.
Dans quel cas le télépilote est susceptible de provoquer le décrochage de son aéronef : En cas d’angle d’incidence trop important. Lors du décrochage, l’air perd son emprise sur l’aile ou la pâle d’hélice ce qui dégrade considérablement la portance. Il peut être provoqué par un angle d’incidence trop important.
Sélectionnez la définition correspondant au renversement dynamique d’un aéronef : Le décrochage dissymétrique de l’aéronef causé par un pilotage trop brusque du pilote.
L’angle de calage d’une hélice entre son extrémité et son moyeu : Augmente. Cet angle de calage est décroissant entre le moyeu et l’extrémité de l’hélice de façon à obtenir une résistance à l’air homogène sur son diamètre.
Toutes choses égales par ailleurs, lorsque l’altitude augmente : La portance diminue. La diminution de la portance avec l’augmentation de l’altitude est principalement due à la diminution de la densité de l’air à mesure que l’on s’élève. À des altitudes plus élevées, l’air est moins dense, ce qui signifie qu’il y a moins de molécules d’air par unité de volume.
Pour réaliser un mouvement de lacet dans le sens horaire sur un aéronef multirotor : On diminue la vitesse de rotation des moteurs tournant en sens horaire et on augmente la vitesse de rotation des moteurs tournant en sens anti-horaire.
Lorsque l’angle d’incidence d’un aéronef augmente à vitesse constante, on obtient le phénomène suivant : La portance augmente jusqu’au point de décrochage entrainant une perte d’emprise de l’aile. Lorsque l’angle d’incidence augmente, la portance généralement augmente également, car une plus grande partie de l’aile est exposée au flux d’air, ce qui augmente la différence de pression entre l’extrados et l’intrados de l’aile.
Pour quelle raison les drones de type hélicoptère disposent-ils d’un rotor anti-couple ? Afin de contrôler les mouvements de l’aéronef par rapport à l’axe de lacet.
L’angle entre la corde de référence du profil d’une aile et le vent relatif est appelé : L’angle d’incidence.
Que se passe-t-il quand un aéronef de type hélicoptère souhaite avancer vers l’avant ? Les pales du rotor principal basculent vers l’avant. Un hélicoptère se déplace en changeant l’angle d’incidence des pales du rotor principal alors qu’elles tournent. C’est ce qu’on appelle le « cyclic pitch ». Lorsque le pilote souhaite avancer, il utilise le levier de commande cyclique pour faire basculer les pales du rotor vers l’avant lorsqu’elles passent sur la partie avant de l’hélicoptère.
Que devez-vous faire lorsqu’une hélice de votre aéronef est dégradée de façon significative : Il faudra remplacer cette hélice par une autre disposant d’un pas et d’un diamètre équivalent.
Comment se caractérise le bord de fuite d’une aile ? Le bord de fuite se trouve sur la partie arrière de l’aile.
À quoi correspond le pas d’une hélice ? À la distance parcourue par l’hélice pour une rotation effectuée. Le pas est la distance théorique parcourue par l’hélice lorsqu’elle effectue une rotation.
Lorsqu’un aéronef à voilure fixe évolue à grande vitesse, il : A un angle d’incidence faible. Un aéronef à voilure fixe a un angle d’incidence plus faible lorsqu’il évolue rapidement. Cet angle d’incidence augmente lorsqu’il évolue lentement. Cela permet de compenser la perte de portance engendrée par la diminution de la vitesse.
Comment un aéronef de type multirotor réalise un vol stationnaire : Il met en rotation ses hélices à la même vitesse. Les rotations générées par les hélices des moteurs s’annulent lorsqu’elles évoluent dans un sens opposé.
Pour réaliser une action de piquer avec un aéronef de type planeur vous utilisez l’axe : De tangage
Que se passe-t-il lorsque la vitesse diminue autour d’un profil de l’aile à incidence constante ? L’aile perd en portance et sa traînée diminue.
Le diamètre d’une hélice s’exprime en : Pouce.
À altitude constante, comment évolue la portance lorsqu’un planeur passe d’un vol en ligne droite à un vol en virage ? La portance augmente. Premièrement, la direction de la portance n’est plus verticale, mais est inclinée vers l’intérieur du virage. Deuxièmement, pour maintenir le vol en palier pendant le virage (c’est-à-dire pour ne pas descendre), le pilote doit augmenter la portance totale. Cela se fait en augmentant l’angle d’incidence des ailes, généralement en tirant un peu sur le manche. Cela augmente la portance totale, mais aussi la traînée, ce qui signifie que le planeur ralentit.
Comment se décompose la portance autours d’un profil d’aile ? 75% de la portance est générée par un phénomène de dépression sur l’extrados. Lorsqu’un avion vole, l’air qui passe sur le dessus de l’aile doit parcourir une distance plus grande que l’air qui passe sous l’aile, ce qui signifie qu’il doit se déplacer plus rapidement. Selon le principe de Bernoulli, une augmentation de la vitesse de l’air entraîne une diminution de la pression. C’est pourquoi la pression sur le dessus de l’aile (extrados) est inférieure à la pression sous l’aile (intrados). Cette différence de pression crée une force ascendante sur l’aile, c’est ce qu’on appelle la portance. Il est généralement admis que la majorité de la portance environ 75 % est générée par la diminution de la pression sur l’extrados plutôt que par l’augmentation de la pression sur l’intrados.
Quel est, en général, la valeur de “l’angle de calage” de l’hélice que nous retrouvons sur les aéronefs télépilotés ? L’angle du profil se situant à 75% du rayon maximum de l’hélice. On dit que la pale est vrillée.
La gouverne de profondeur de votre aéronef est baissée, votre aéronef a une tendance à : Piquer.
Dans le cas d’un vol stationnaire, les moteurs : Se mettent en rotation à une même vitesse.
Sur un aéronef à voilure fixe, comment modifier de façon significative la maniabilité du drone ? En modifiant l’emplacement du centre de gravité de l’aéronef.
Comment évolue le calage d’une hélice entre le moyeu et son extrémité ? Il diminue.
Quand est-ce que la finesse d’un drone à voilure fixe est à son maximum ? Lorsque le rapport portance/traînée est à son maximum.
L’augmentation de la force du vent pendant un vol a pour effet : 1 – d’accroitre le stress chez le télépilote. 3 – de rendre les déplacements plus complexes. 4 – de réduire l’autonomie de la batterie.
Par vent fort, vous souhaitez réaliser un vol stationnaire avec votre aéronef équipé d’un GPS : Je n’interviens pas sur les commandes et laisse l’assistance du GPS maintenir mon aéronef sur sa position. Un drone équipé d’un système GPS a la capacité de maintenir une position stationnaire même en présence de vent. Il utilise son GPS pour connaître sa position et utilise ses moteurs pour compenser tout mouvement non intentionnel, comme celui causé par le vent. Quand un vent important fait dévier votre drone, celui-ci va automatiquement essayer de revenir à sa position initiale, grâce à son système de positionnement GPS.
Vous disposez d’un aéronef de type multirotor avec GPS et souhaitez diminuer l’effet du vent rencontré par votre aéronef, vous : Diminuez l’altitude du vol. En diminuant l’altitude de l’aéronef, le vent perdra en intensité.