

1.1 – Lexique et définitions clés :
Aérodyne : aéronef plus lourd que l’air pouvant s’élever avec l’aide de force aérodynamique émanant d’hélices, réacteurs, etc.. Les avions et hélicoptères sont des aérodynes.
Aéronef : englobe tout type d’appareil en capacité de s’élever et de circuler en altitude
Aérostat : aéronef pouvant s’élever dans l’air grâce à un gaz plus léger que l’air
AFIS : service d’informations et d’alertes donnés pour un aérodrome et émanant d’un organisme de la circulation aérienne, dont le rôle est uniquement informatif (infos pratiques, météo, etc.)
Aire au sein d’un aérodrome :
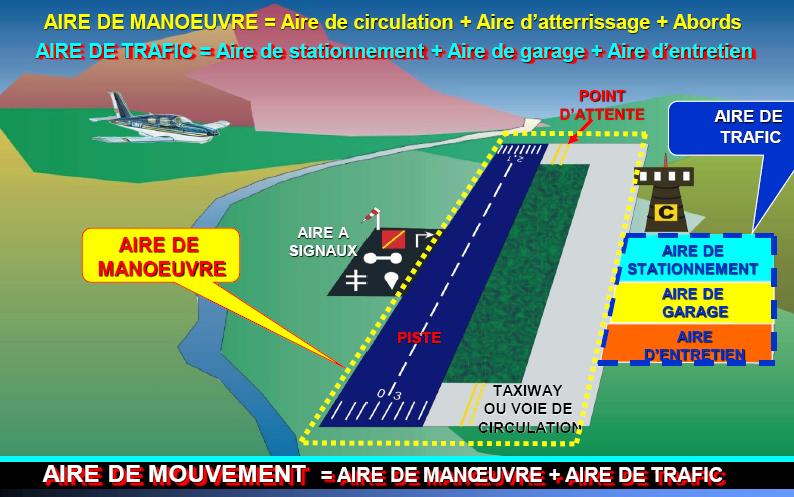
- Aire de trafic : espace permettant le stationnement, l’entretien, la fourniture de carburant, l’embarquement des passagers et du fret
- Aire de manœuvre : espace utilisé pour la circulation des aéronefs, aterissageset décollages (à l’exclusion de l’aire de trafic)
- Aire de mouvement : aire de manœuvre + aire de trafic
- Aire d’attérissage : espace permettant le décollage et attérissage des aéronefs
Airprox : rapprochement anormal de 2 aéronefs n’ayant pas entrainé de conséquence. Tout incident doit faire l’objet d’une rapport aux autorités de l’aviation civile
Altitude : se définit par la distance entre le niveau de la mer et un point ou ojet
Attitude d’un aéronef : caractérisée par son cap magnétique ou vrai (direction par rapport au pôle magnétique ou géographique), son assiette (angle entre l’axe longitudinal et le plan horizontal) et son inclinaison (angle entre l’axe transversal et l’horizontale).
Autorité ATS : autorité instaurée par l’Etat dans un espace aérien délimité pour délivrer les services nécessaires à la circulation des aéronefs
Cap : définit l’orientation de la partie avant de l’appareil par rapport au Nord
Circulation aérienne : regroupe la globalité des aéronefs en vol ou en mouvement sur une aire de manœuvre
CTR : espace aérien réglementé ou zone de contrôle. C’est un espace aérien défini en proximité d’un aérodrome. il a pour objectif de sécuriser l’atterrissage et le décollage d’aéronefs
Détection et évitement : principe de voir, d’anticiper ou de reconnaitre les dangers et conflits de circulation accompagné de la mise en oeuvre de solutions adaptées.
DGAC : Direction générale de l’aviation civile, autorité française compétente dans le domaine de l’aviation civile.
DSAC : Direction de la sécurité de l’aviation civile, service de la DGAC qui a vocation à être l’autorité compétente pour les sujets de certification et de surveillance.
Exploitant : personne ou entité ayant la responsabilité d’une mission de pilotage de drone
Hauteur : distance entre un point ou un objet et le sol ou à un niveau de référence
IFR : règles de vol aux instruments
IMC : conditions météorologiques de vol aux instruments
Niveau : désigne la hauteur ou l’altitude sur un plan vertical. Il est nécessaire d’avoir un niveau de référence pour définir le niveau de vol de l’aéronef.
NOTAM : Notice to Air men – messages d’informations émanant d’organisme de contrôle aérien et informant les pilotes de l’évolution des conditions de vol et des infrastructures.
Observateur RPA : personnel doté d’une formation et de compétences permettant l’assistance du télépilote en assurant la sécurité du vol pendant sa réalisation. cette aide se traduit par une observation directe et continue de l’aéronef.
Plafond : désigne la limite supérieure d’une zone de vol, et peut également désigner la couche de nuage couvrant le ciel et étant le plus proche de la terre.
Plancher : limite inférieure d’une zone de vol
Poste de télépilotage : élément faisant partie du système de l’aéronef télépiloté et permettant son contrôle (ex : télécommande).
Service de la circulation aérienne (ATS) : il y a 3 services fournis aux utilisateurs de l’air :
- service d’alerte : prévient les organismes compétents en cas d’urgence
- service de contrôle : régule la circulation aérienne et prévient les abordages et les collisions
- service d’information : donne les informations concernant les conditions de vol
SIA – Service de l’information aéronautique : produit les publications permettant une navigation régulière, efficace et sécurisée (cartes VAC, cartes VFR, NOTAM, etc.)
Système d’aéronef télépiloté (RPAS) : définit l’ensemble des composants nécessaires à la conception et l’utilisation standard d’un aéronef (exemple : l’aéronef, les liaisons de commande, le poste de télépilotage, etc.)
VFR : désigne les règles de vol à vue
Visibilité : correspond à la distance la plus importante permettant de distinguer convenablement un objet
VMC : désigne les conditions météorologiques de vol à vue
Vol autonome : la trajectoire de l’aéronef est programmée et se réalise sans possibilité d’intervention du télépilote
Vol automatique : permet de programmer une trajectoire tout en laissant la possibilité au pilote de la modifier et de reprendre la main.
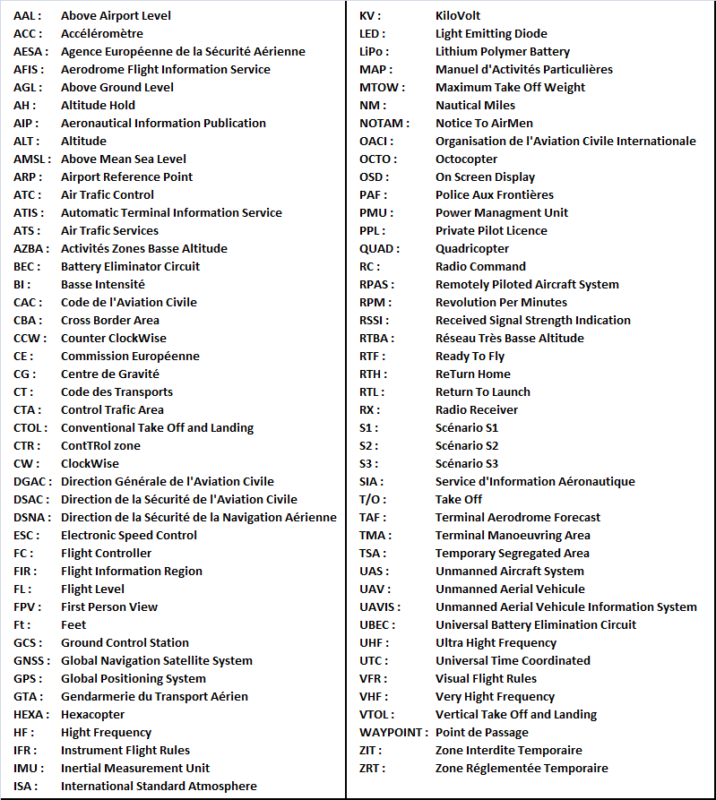
Les abréviations:
1.2 – Système et énergie
En comparaison avec une rivière, la différence de potentiel entre 2 bornes (Volts) correspond au dénivelé de la rivière, et l’intensité du courant (Ampère) correspond au débit de la rivière.
Un interrupteur général permet d’isoler le circuit. Les fusibles le protègent en cas de surintensité.
La batterie fournit de l’énergie, mesurée en Joules (J).
Le débit d’énergie par seconde s’appelle la puissance et est mesuré en Watt (W)
Pour exprimer l’énergie, on utilise le Watt/Heure. Quand 1 W est délivré pendant 1 heure, l’énergie est de 1 W/h, soit 3600 J
La capacité de la batterie : charge électrique totale pouvant être délivrée dans le circuit, s’exprime en ampère-heure (Ah). Une capacité de 3 Ah signifie que la batterie peut fournir 3 A pendant 1h.
Le moteur transforme la puissance électrique en puissance mécanique en fonction d’un certain rendement. La puissance mécanique, c’est le produit « couple x vitesse de rotation », soit puissance électrique fournie aux moteurs x rendement du moteur.
La loi d’Ohm = calcul reliant la tension (U) à la résistance (R) et l’intensité (I)
- Formule : U = R x I
- La tension (U) est l’écart relevé entre 2 bornes d’un circuit et définit le volume d’électricité circulant, et se mesure en Volts (V)
- La Résistance (R) permet de réguler le courant électrique en transformant une partie de l’électricité en chaleur. Le courant peut ainsi être délivré de façon adaptée aux différentes pièces de l’aéronef. Elle se mesure en Ohm.
- La charge discontinue qui aliment les moteurs Brushless peut être délivrée grâce aux résistances du circuit de l’aéronef.
- La conductivité est l’opposée de la résistivité, elle correspond à la capacité d’un matériau à conduire et permettre le passage de l’électricité.
- La puissance électrique correspond à la quantité d’énergie reçue ou produite dans un circuit électrique pour une unité de temps. Le circuit comprend à minima un générateur électrique, un conducteur et un récepteur. La puissance s’exprime en Watt
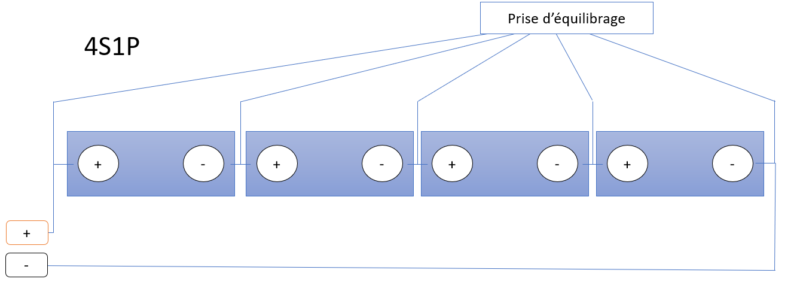
- Les circuits électriques peuvent être montés en parallèle, ce qui signifie que plusieurs composants sont connectés sur les mêmes bornes, les INTENSITES SONT ADDITIONNEES. SI un composant tombe en panne, les autres composants continuent de fonctionner
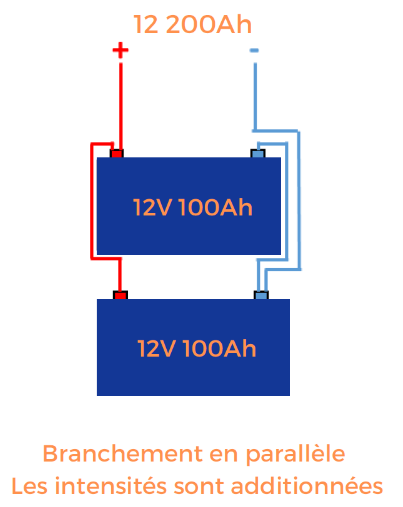
La tension nominal d’un ensemble est égale à la tension d’une des batteries
La capacité de l’ensemble est égale au produit de la capacité unitaire x le nombre de batteries. Par ex, un ensemble de 2 batteries de 12v et 60 Ah en parallèle est équivalent à une batterie de 12V et de 120 Ah.
Le montage de cellules en parallèle permet d’augmenter la capacité, donc l’autonomie pour une puissance donnée.
- les circuits peuvent être montés en série, les composants sont connectés les uns aux autres, les TENSIONS SONT ADDITIONNEES. Si un composant tombe en panne, les autres composants cessent de fonctionner.
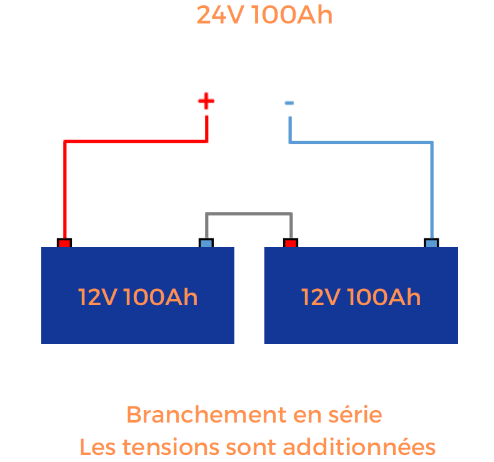
La tension nominale de l’ensemble = produit de la tension unitaire x le nombre de batteries
la capacité de l’ensemble = la capacité d’une des batteries. 2 batteries de 12v et 60Ah en série est équivalent à une batterie de 24 V et 60 Ah.
Le montage en série permet d’augmenter la tension nominale sans augmenter l’intensité, pour une puissance donnée. L’intérêt de limiter l’intensité est de limiter la taille des connecteurs et conducteurs qui n’ont pas besoin d’être lourds.
1.2.1 – les composants techniques
Batteries
Les batteries de drones sont des batteries lithium-polymer dites Lipo, elles sont inflammables. Prudence et respect des recommandations constructeurs.
Les cellules des batteries doivent rester à une tension proche les unes des autres, elles ne doivent pas être utilisées si elles sont détériorées, et elles sont moins performantes si utilisées en basse température. Elles doivent être chauffées selon la notice avant utilisation.
Elles ne doivent pas descendre en dessous des 3 volts, doivent être chargées avec le matériel recommandé et stockées dans des sacs ignifugés. Elles fournissent une puissance stable pendant leur utilisation.
La tension nominale des cellules est de 3.7 volts, et la capacité de la batterie est exprimée en milliampères/heure (mAh).
1.2.2 – Lire une batterie

3S1P = 3 éléments en série de 3.7v permettant une intensité de 11.1V, pour un ampérage de 2200 mAh, soit une puissance de 24.42 Wh.
- « 3S » signifie 3 cellules en série : on additionne les tensions
- « 1P » signifie 1 en parallèle : on additionnerait les ampères
- C = capacités de décharge de la batterie, s’exprime en Ah ou en mAh. Une batterie de 3000 mAh peut décharger 3A pendant 1h à sa tension nominale.
Capacité : représente la charge électrique totale qu’elle peut délivrer. Lorsque la capacité est multipliée par la tension nominale, on connait l’énergie contenue dans une batterie, exprimée en Wh.
Capacité de décharge : intensité maximale que peut fournir la batterie. Par ex, une batterie 5C peut décharger 5 x son intensité nominale. Une cellule de 2200mAh, si elle est 5C, peut fournir 2.2 A * 5 = 11 A.
Cette capacité de décharge en continu permet par exemple de fournir beaucoup d’énergie pour le décollage. Ce taux de décharge maximum est lié à la résistance interne de la batterie. Si on dépasse l’intensité maximum du taux de décharge maximum, la tension s’effondre, et les systèmes électroniques se coupent.
Le taux de décharge augment avec la température, il faut donc préchauffer les batterie quand il fait très froid. Il ne faut pas stocker une batterie entièrement chargée. De plus, les batteries Lipo sont dangereuse car un simple déséquilibrage pendant la charge peut provoquer un incendie.
Analogie avec un barrage hydroélectrique :
- capacité = poids de l’eau
- tension nominale = hauteur moyenne d’eau au-dessus de la turbine
- capacité de décharge = ouverture maximale de la vanne d’alimentation des turbines. Selon le degré d’ouverture de la vanne, la puissance fournie sera plus ou moins grande , et l’énergie du barrage consommée plus ou moins vite.
Exemples
4 cellules de 3.7Vde tension nominale : en série, 3.7 * 4 = 14.8V.
Si chaque cellule à une capacité de 2.2 Ah, la capacité de la batterie est de 2.2 Ah.
Avec une intensité de 2.2Ah, la puissance de la batterie est 14.8V x 2.2Ah = 32.56 W. La batterie peut donc délivrer cette puissance pendant 1h. Si les cellules sont 3C en continu, la batterie pourra délivrer 3 x 32.56 W = 97.68 pendant 1/3 d’1h, soit 20 minutes. La quantité d’énergie est la même mais utilisée 3x plus vite.

les 4 cellules d 3.7V et 2.2 A montées en série donnent une tension de 14.8 V et une capcité de 2.2 A. Le branchement en parallèle 2P donne toujours une tension de 14.8 V mais une capacité de 4.4 A, soit une capacité doublée de . La quantité d’énergie est donc doublée, à 65.12 Wh. Si les cellules sont 5C, l’intensité maximum sera de 5x 4.4A, soit 22A. Si la capacité de décharge 5C est en continu, alors elle pourra délivrer par exemple délivrer 325.6 W pendant 12 minutes (65.12W x 5) sur 1/5 de temps. Mais l’énergie disponible reste de 65.12 Wh. Exemple chiffré : un vol nécessite 130W au décollage pendant 1 minute et 100W en croisière pendant 30 min. La consommation est de 52.17W, et il restera une réserve de 12.95 Wh.
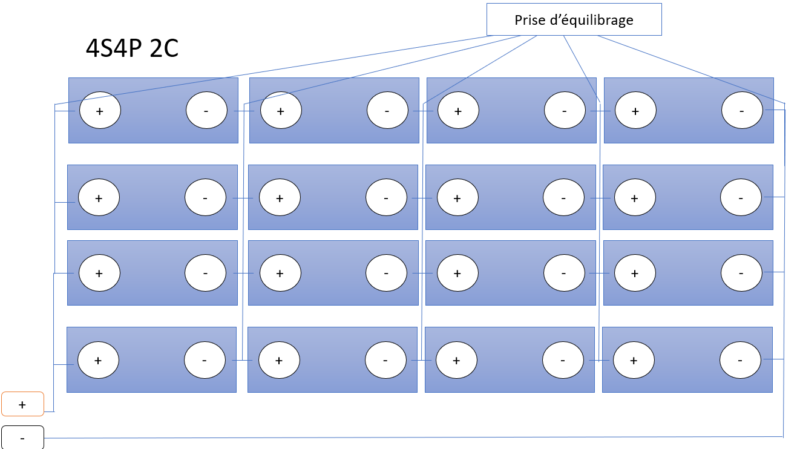
Tension nominale de 14.8V, capacité de 8.8 A
Puissance délivrée = somme des puissances de chacun des circuits = énergie électrique totale disponible = 130.24 Wh (14.8 V* 8.8 A). Comme la batterie est 2C, en régime transitoire, elle peut fournir 260.48 Wh pendant un temps restreint, ce qui réduira l’autonomie de la batterie, puisque l’énergie totale disponible est 130.24 W pendant 1 heure.
Application pratique
- Vous disposez d’une LiPo 4S2P de 8 000 mAh. La puissance de cette batterie est : 118,4 Wh. Une seule cellule présente une tension de 3,7 volts. Pour augmenter cette valeur, les cellules LiPo sont connectées en série. On trouve des modèles 3S (3 cellules), 4S (4 cellules), voire 6S (6 cellules). Sur une batterie 4S, la tension est de 4 x 3,7 volts, soit 14,8 volts. Sur certaines batteries, on trouve aussi une valeur P. Par exemple: 4S2P. Le P signifie «parallèle». Dans cet exemple, il s’agit donc de deux 4S connectées en parallèle. Nous n’additionnons pas les tensions de nos 2 modules 4S. Nous avons donc (4 x 3,7 x 8)/1000 = 118,4 Wh.
- Calculez la capacité en ampères-heure d’une batterie avec une puissance de 70W et une tension de 10V : 7 Ah. La capacité d’une batterie en Ampères-heure s’obtient par la formule : Watts / Volts. On peut donc faire le calcul : 70 / 10 = 7 Ampères-heure.
- Sur une batterie LiPo 4S1P de 5 000 mAh, l’inscription 35C correspond à un courant de sortie disponible de : 175 ampères. Le courant de sortie sera calculé comme suit : (5 000 mAh/1000) x 35C = 175 Amperes, cette batterie LiPo a un courant de sortie disponible de 175A.
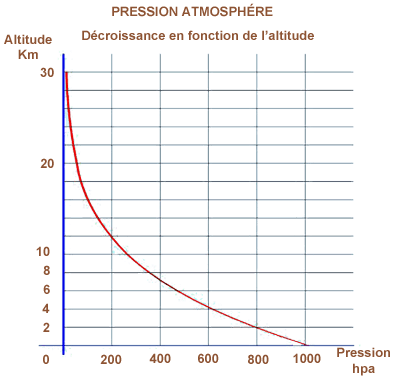
1.3 – Pression atmosphérique et Altitude
A la verticale d’un lieu, la pression atmosphérique diminue lorsque l’altitude augmente.
A la verticale d’un lieu, la pression atmosphérique diminue d’autant plus vite avec l’altitude que l’atmosphère est dense, donc que la température est basse (froid = molécules d’air se resserrent).
Si on connait la pression atmosphérique en un point donné, on peut mesurer la hauteur de tout point à la verticale en mesurant la pression atmosphérique et les températures de l’air. C’est le nivellement barométrique.
Au niveau de l amer en condition standard (1013.25 hPa, température 15°C), la pression atmosphérique diminue de 1hPa pour une élévation d 27.31ft, soit 8.32m (et 1hPa tous les 11.2m à 3000m).
1.3.1 – Le baromètre
Associé au thermomètre, c’est un mauvais capteur absolu pour la mesure de l’altitude, car l’atmosphère change dans le temps et dans l’espace. En cas de changement météo, on peut observer jusqu’à 2hPa de variation de pression, soit près de 20m.
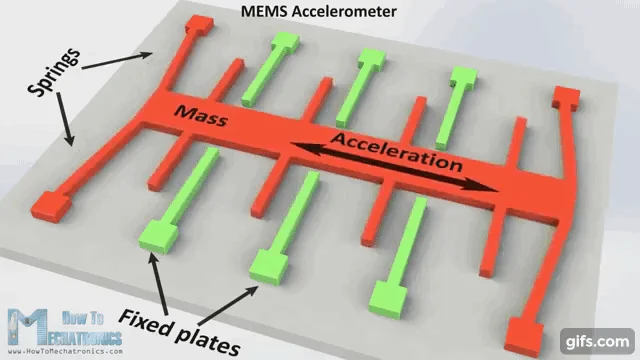
Les capteurs barométriques sont généralement des MEMS( Micro Electro Mechanical System).
La capsule anéroïde
Capteur de pression sous forme de boite étanche qui permet de mesurer la pression atmosphérique en statique Il donne une distance verticale barométrique, utilisé pour des faibles pressions.
Le baromètre piézo-électrique
Utilise l’effet piézoélectrique afin de mesurer des grandeurs physiques telles que la pression, l’accélération, ou toute autre grandeur engendrant des déformations mécaniques par le biais de matériaux actifs.
L’altimètre
Mesure l’altitude en utilisant la formule du nivellement barométrique basé sur la diminution de la pression atmosphérique avec l’altitude.
Genre de baromètre qui transforme une hauteur de pression en distance verticale via la formule :
1 hpa = 8.5m
Suivant la pression de référence, il indique :
- si la pression de référence est le SOL = il indique la hauteur
- si la pression de référence est le niveau de la mer = il indique l’altitude
Sur un drone, l’altimètre est souvent couplé à un capteur d’ultrasons pour affiner le positionnement par rapport au sol.
Baromètre et Thermomètre sont associés au GPS, qui est u bon capteur absolu, mais à la précision médiocre (+/-10m de précision verticale).
Le capteur à ultrasons permet la lecture de la hauteur en mesurant le temps AR de l’onde acoustique qui rebondit sur le sol.
1.3.2 – Champ magnétique
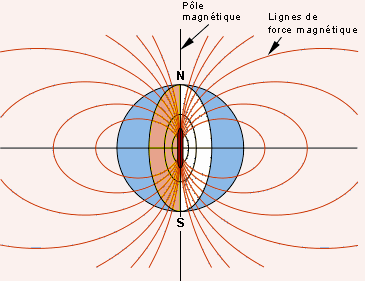
Champ magnétique = grandeur disposant d’un sens, d’une direction et d’une norme. Sa modélisation permet de comprendre les effets magnétiques autour de la Terre.
Un champ magnétique est représenté par sa direction, son sens et son intensité. A l’équateur, le vecteur du champ magnétique est dans le plan horizontal. Aux pôles magnétiques, le vecteur champ magnétique est vertical.
Pôle Nord et pôle Sud ont une attraction magnétique propre, qui s’équilibre au niveau de l’équateur grâce à l’horizontalité du champ généré. A l’approche des pôles, l’horizontalité se dégrade et la boussole devient inutile.
La France a un angle horizontal de 65° approximatif.
En chaque point de la surface de la Terre, l’angle orienté entre le Nord Vrai (Nv) pris comme référence et le Nord Magnétique (Nm) définit la déclinaison magnétique (Dm) en ce point. Si le Nord magnétique est la l’Est du Nord Vrai, la déclinaison est positive. Si le Nm et à l’Ouest du Nv, elle est négative.
Il existe le WMM (Wold Magnetic Model) qui donne les valeurs de la déclinaison magnétique. Il est mis à jour tous les 5 ans.
1.3.3 – Le Magnétomètre
Il mesure l’orientation et l’intensité du champ magnétique local. Il fournit 2 des 3 informations nécessaires à la mesure de l’attitude du drone. Lorsque d’autres capteurs indiquent que l’assiette et l’inclinaison du drone sont nulles, il permet de déduire le cap magnétique, et l’autopilote connaissant la déclinaison magnétique va déduire le cap vrai du drone.
Les compas utilisés pour les drones s’appellent des magnétomètres. ce sont des MEMS. Ils mesurent l’intensité du champs magnétique dans les axes de référence de l’aéronef. En comparant l’orientation du champ magnétique du lieu connu par le WMM avec la mesure du magnétomètre, l’autopilote dispose dispose d’une information sur l’attitude de l’appareil. Cette attitude sera complétée par les autres instruments, gyromètres et accéléromètres).
2 technologies principales :
- capteurs à effet HALL : mesure la déviation d’un flux d’electron par le champ magnétique local.
- capteurs à effet AMR : utilise un matériau anisotrope, qui n’a pas les mêmes propriétés physiques selon les directions de l’espace, et dont la résistance va varier selon le courant magnétique qui le traverse.
Quasiment tous les magnétomètres du marché sont numériques.
A l’équateur, le champ magnétique est dans l’horizontal.
Au pôle Nord magnétique, le vecteur champ magnétique est à la verticale.
Plus la latitude augmente, moins la mesure du Nord magnétique est précise.
Les erreurs de mesure :
- Hard Iron Effet : champ magnétique additionnel fixe par rapport au capteur, comme un aimant ou tout matériaux ferromagnétique lié au véhicule, qui va ajouter un champ en direction du capteur.
- Soft Iron Effect : déformation locale du champ magnétique par des matériaux comme le fer ou le nickel qui créent une distorsion des lignes de champ.
Compas magnétique : utilise l’aimantation naturelle de la terre, orientée pôle Nord magnétique. Mais il y a des champs magnétiques perturbateurs, comme les circuits électriques, ce qui peut faire dévier la boussole et entrainer des erreurs de navigation. Il faut régulièrement recalibrer le compas magnétique en utilisant des repères visuels ou des signaux radios.
Le compas électronique , compas de direction gyroscopique, , utilise des gyroscope et des capteurs pour indiquer la direction. Plus précis et moins sujet aux erreurs. En combinant les informations fournies par le gyroscope avec des capteurs d’orientation de l’avion, l’altitude et la vitesse, le compas électronique peut fournir une indication précise et fiable de la direction dans laquelle se dirige l’avion.
Compas magnétiques :
Les compas à aiguilles : aiguille aimantée pour indiquer la direction, dans l’huile pour réduire les frictions
Les compas à boussole : boussole pour indiquer la direction.
Les compas à flotteur : avec un flotteur aimanté
Sont utilisés pour les vols courts et à basse altitude.
Compas électroniques :
Compas de direction gyroscopique : utilise des gyroscopes électromécaniques pour maintenir une direction fixe par rapport à l’espace. Fiabilité et précision élevées.
Compas à laser : application de navigation de précision, type drone et véhicules autonomes
Compas à inertie : utilisent des accéléromètres et des capteurs de vitesse pour mesurer les mouvements. Pour navigation longue durée, donc longue distance.
1.3.4 – Les instruments gyroscopiques
Le gyromètre mesure les composantes par rapport aux axes de roulis, de tangage et de lacet, de la vitesse de rotation du drone autour de son centre de gravité. Les FOG avec fibre optiques mesure les interférences de la vitesse de la lumière dans un anneau, mais technologie lourde et encombrante.
Les gyromètres des drones sont des MEMS, sensibles à la force de Coriolis, qui va modifier la capacité électrique des éléments dédiés à chaque axe.
Le gyromètre mesure les composantes par rapport aux 3 axes de référence de l’UAS, soient les axes de roulis, de tangage et de lacet, de la vitesse de rotation du drone autour de son centre de gravité. Alors que le gyroscope donne une référence absolue d’orientation.
Les mesures sont échantillonnées à une fréquence équivalente à celle de la dynamique des actionneurs du véhicule. En connaissant l’attitude initiale, l’échantillonnage des mesures va permettre l’intégration mathématique des mesures qui déterminera l’attitude de l’aéronef.
Gyroscope – principes de base
Utilise la conservation du moment angulaire pour maintenir une direction fixe. Composé d’un rotor qui tourne à haute vitesse autour d’un axe central, avec des roulements qui permettent au rotor de tourner librement autour d’axes secondaires.
Principe : si un objet tourne à une vitesse suffisamment élevée autour d’un axe, il aura une certaine quantité d’inertie qui lui permettra de conserver sa direction par rapport à l’espace même si des forces extérieurs sont appliquées. c’est la propriété appelée la conservation du moment angulaire.
Ils sont utilisés pour stabiliser des plateformes, maintenir la direction de véhicule, navigation, géodésie (étude de la forme de la Terre, du calcul de ses dimensions et de la mesure de son champs de gravité).
Les gyroscopes électromécaniques sont très précis et fiable. Les gyroscope électroniques ont des dimensions plus réduites, pour des applications avec une faible consommation d’énergie.
Les gyroscopes à rotor libre : rotor qui tourne à haute vitesse et monté sur des roulements à bille ou rouleaux. Le rotor est libre autour de son axe

Gyroscope à rotor soutenu : rotor qui tourne à haute vitesse et monté sur des roulements à bille ou rouleaux. Le rotor est maintenu en position autour de son axe, donc direction fixe par rapport à l’espace.
Gyroscope à fibres optiques : des fibres optiques détectent des changements de position, très précis et faible sensibilité au magnétisme. Navigation et Géodésie.
Gyroscope à effet Sagnac : utilise l’effet Sagnac pour détecter les changements de position. Composé d’un anneau de fibres optiques qui tourne à vitesse élevée. Les changements de position sont détectés en mesurant les différence de temps de parcours de la lumière à travers l’anneau. Très précis .
Gyroscope électroniques : utilise des capteurs électroniques pour détecter les changements de position. Peu couteux mais plus sensibles.
Gyrolaser : Gyroscope optique, qui émet un unique faisceau laser dans 2 directions différentes. Si mouvement, le décalage temporel des faisceau laser avec leur trajectoire initiale permet d’obtenir les vitesses angulaires grâce à des miroirs et des capteurs.
Gyroscope à structure de vibration ou Gyromètre MEMS (Micro Electro Mechanical Systems) : mesure la vitesse angulaire causée par l’accélération du Coriolis. La vitesse d’accélération permet de mesurer la force exercée et de déduire la vitesse angulaire.
En associant ces instruments avec un accéléromètre ou un magnétomètre, on obtient l’Unité de Mesure Inertielle (IMU). Elle donne la position approximative du drone en analysant les informations de vitesse, d’accélération et de positions relevées.
Propriétés fondamentales
Inertie : une forte inertie permet à un gyroscope de maintenir sa direction par rapport à l’espace, même lorsqu’il est soumis à des forces extérieures.
Précession : lorsqu’un couple est appliqué à un gyroscope, il ne tourne pas autour de son axe principal, mais il précède autour d’un axe perpendiculaire à celui du couple. Ca permet aux gyroscopes de détecter les changements de direction et de maintenir une direction stable (ex : la toupie).
Stabilisation : stabiliser les systèmes en rotation, comme les plateformes de navigation ou systèmes de stabilisation de caméras.
Précision : les gyroscopes mécaniques sont ultra précis
Fiabilité : même chose
Sensibilité aux champs magnétiques : même chose.
Dérive, précession
Dérive et précession sont liés à l’inertie et à la rotation des gyroscopes.
Dérive : L’axe principal peut être dévié par des forces extérieures comme la friction ou les perturbations électro-magnétiques.
Précession : lorsqu’un couple est associé à un gyroscope, il ne tourne pas sur son axe principal mais sur un axe perpendiculaire à celui du couple.
1.3.5 – Accéléromètre
L’accélération représente l’évolution de la vitesse dans un court laps de temps autour d’un instant donné. Connaissant l’accélération d’un mobile ainsi que sa vitesse et sa position initiale, on peut déterminer sa position au fil du temps.
L’accéléromètre mesure l’accélération du centre de gravité du drone.
Principe fondamental de la dynamique : l’accélération (« a ») du centre de gravité d’un objet de masse (« m ») est proportionnelle à la résultante « R » des forces extérieures exercées sur lui. donc R = m.a
déduira l’accélération de l apesanteur de chacun des axes pour obtenir l’accélération. En utilisant les autres capteurs, baromètre, gyromètre, magnétomètre, accéléromètre et GPS, on contrôle la position et l’attitude de l’appareil. La qualité des capteurs et des formules mathématiques est capitale.
1.3.6 – Le GNSS
Le système de position par satellite est constitué de satellites, de stations de contrôle et de récepteurs individuels. GPS US, Galiléo européen, GLONASS russe, COMPASS chinois et IRNSS indien.
Chaque satellite enregistre ses éphémérides, cad sa position dans le référentiel terrestre et son heure (horloge atomique). les décalages entre heure de réception et heure d’émission du signal émis par au moins 4 satellites permettent de synchroniser l’heure du récepteur et de donner sa position, soit 4 équations pour 4 inconnues : heure et 3 coordonnées). Latitude, Longitude et altitude sont positionnées sur le système géodésique WGS84. Le calculateur dérive le vecteur-vitesse, le vecteur-accélération du récepteur, et utilise les positions successives pour tracer la trajectoire.
Il y a quelques phénomènes influents qui vont impacter la mesure du temps, qui s’appellent Geometric Dilution of position, GDOP. On a donc une incertitude de +/- 10m à +/- 5m en fonction des conditions d’observation.
La disponibilité du système est liée à la couverture de réception des satellites, et donc le GNSS ne peut fonctionner à l’intérieur des bâtiments, d’où le challenge pour fixer des waypoints « indoor ».
En mesurant le déphasage du signal GPS, sachant que la longueur d’onde à 1575 MHz ets de 19cm, on peut arriver à détecter une position sur 1.9mm. C’est une correction appelée RTK (Real Time Kinematic).
L’intégrité : assurance de la validité de la mesure du système.
1.3.7 – Intégration des capteurs
Le positionnement dans l’espace est le produit du processus utilisant les contributions de tous les capteurs. Chaque capteur a un rôle, un principe physique, et des limitations. L’autopilote intègre les mesures de chaque capteur et estime, par des modèles mathématiques, la meilleure position du drone.
| Capteur | objectif | principe | limitations |
| Altimètre | mesure de la hauteur du drone | altimètre barométrique = décroissance de la pression atmosphérique avec l’altitude à la verticale d’un lieu. Si laser ou Lidar, mesure du temps AR d’une onde se réfléchissant sur la surface. | Variation de la pression atmosphérique dans l’espace et le temps en fonction de la météo. Prise en compte de la température pour estimer la valeur de la masse volumique de l’air dans la formule de nivellement barométrique. |
| Magnétomètre | Mesure des composante du champ magnétique terrestre par rapport aux axes de références de l’appareil et contribution à l’estimation de l’attitude | Le champ magnétique terrestre est connu en chaque lieu, la mesure sur les axes de référence permet d’estimer l’attitude dans l’espace en donnant 2 angles sur les 3 nécessaires. | Degré d’incertitude et perturbations magnétiques du au Hard et Soft Iron Effect. |
| Gyromètre | Mesure des composantes de la vitesse de rotation du drone autour de son centre de gravité | Technologie MEMS, mesure de la force d’inertie de Coriolis due à la rotation du drone autour de son centre d ‘inertie. | Erreurs de biais dues à la température et aux vibrations. La fréquence d’échantillonnage des mesures doit être cohérente avec les éléments de la chaîne de mesure et de contrôle. |
| Accéléromètre | Mesure des composantes de l’accélération du centre de gravité de l’appareil par rapport aux axes de référence du drone. | On mesure l’élongation du système « masse-ressort » sollicité par la gravité et la composante de l’accélération du drone sur l’axe considéré. | La mesure de l’accéléromètre n’est utile qu’associée aux autres capteurs pour déterminer l’accélération, l’attitude et la position du drone. |
| GNSS | Mesure la position du drone (L, l, A) dans le référentiel WGS84 | Mesure de la distance par des satellites dont la position est connue en permanence. Il est nécessaire d’avoir 4 satellites en visibilité pour avoir la 3D. | Précision dépend du nombre de satellites et de la qualité de propagation du signal. |
Capteurs
Accéléromètre : capteur équipé d’un système de ressort absorbant la force de l’accélération en se compressant. Cette compression permet de mesurer l’accélération du drone lors de ses déplacements et d’en déduire son axe latéral et son inclinaison. On parle d’accéléromètre triaxial.
Capteur de pression : les aéronefs sont équipés d’un baromètre, c’est le capteur qui permet de mesurer la pression rencontrée lors de la montée en altitude. L’intensité de la pression en vol accompagnée de l’information de la pression au sol permettent grâce à la Loi de la décroissance théorique de définir la hauteur de l’aéronef.
La pression est liée aux conditions météorologiques, l’association d’un baromètre à un GPS permet d’augmenter la précision d’information d’hauteur donnée au télépilote.
- L’unité de mesure est l’hectopascal hPa
- Dans les basses couches de l’atmosphère, la pression diminue de 1hPa tous les 8.32 mètres, ou 27.3ft
- La pression au niveau de la mer est de 1013.25hPa pour une température de 15°
Limite d’élasticité : elle correspond à la pression maximale que peut connaître un matériau. Si la limite n’est pas dépassé, la pièce concernée retournera à son état initial et ne connaîtra pas de modification particulière, c’est une déformation élastique.
En cas de dépassement de la limite, la pièce est fragilisée, cela modifie son efficacité et entraîne un risque de casse. Elle devra être remplacée par el télépilote avant l’utilisation e l’aéronef.
1.3.8 – Limitation de l’espace
Principe de la ségrégation des trafics pour assurer la sécurité de l’aviation habitée. Un dispositif de limitation verticale est embarqué à bord du drone.
Pour les vol hors vue, il ya également un dispositif de limitation horizontale du volume de vol prédéfini.
La règlementation impose que le télépilote puisse programmer et paramétrer ces limites.
1.4 – Pilotage de base
1.4.1 – Pilotage multi-rotors et voilure fixe
Pour contrôler le couple des rotors CW et CCW, la forme des drone est en X, parfois en + pour les Racers. L’action sur les rotors va permettre le tangage, le roulis ou le lacet.
Pour les drones à voilure fixe, il y a 6 degrés de liberté :
- Angle d’assiette
- Angle d’inclinaison
- Cap
- Latitude
- Longitude
- altitude
Le contrôle d’attitude et la puissance des moteurs suffisent pour réaliser l’ensemble des manœuvres nécessaires au pilotage.
La gouverne de profondeur : autour de l’axe de tangage, dans le plan vertical
Les ailerons : autour de l’axe de roulis, dans le plan horizontal. L’inclinaison de la portance génère le virage
La gouverne de direction : autour de l’axe de lacet, contrôle le vent relatif dans le plan de symétrie
La commande de puissance : passe de vol en palier, en montée ou en descente.
1.4.2 – Pilotage et asservissement
L’implémentation d’automatismes vont décharger le télépilotes d’actions basiques au profit des actions de la mission. Ces automatismes sont les ASSERVISSEMENTS. Cela consiste à confier à un automatisme le contrôle et la réalisation d’une consigne. Il y a les asservissement d’attitude et les asservissements de position (commande la trajectoire).
Asservissement d’attitude
L’objectif est de contrôler l’attitude de l’aéronef en référence aux consignes d’attitude. A un instant donné, les capteurs envoient des mesures de vitesse de rotation, d’accélération, de vecteur de champ magnétique, transmises à l’estimateur qui transmet au contrôleur. L’objectif du contrôleur est une consigne, et il va envoyer une commande aux actuateurs pour respecter cette consigne. Pour un multirotor, les actuateurs seront les 4 moteurs. Si la consigne concerne une assiette, l’aéronef va évoluer pour se rapprocher au mieux de la consigne malgré les perturbations.
Asservissement en position.
Lorsqu’on automatise par un asservissement en attitude, les commandes aux actuateurs vont modifier la position. Exemple, en voulant maintenir une assiette, le drone va monter et descendre du fait des accélérations et ralentissements des moteurs. Il faut rajouter un asservissement en position pour maintenir la hauteur de l’appareil.
Par exemple, sur un quadri-rotor en stationnaire , la commande « avancer » pour opérer une translation vers l’avant va faire afficher une assiette « à piquer ». Donc la consigne « assiette nulle » va être annulée et remplacer.
On utilisera ces asservissements en position pour maintenir le drone à une altitude constante, ou pour le faire évoluer en fonction d’un plan de vol en passant par des waypoints, ou pour le faire suivre une cible mobile (follow-me, Point of Interest, etc.)
1.5 – Dispositifs de sécurité
En fonction des préconisations du constructeur, du scénario d’intervention et de la règlementation, des limites de hauteur et de distance depuis la zone de décollage doivent être respectées.
Si le drone sort des limites définies ou ne délivre plus d’information sur sa localisation, le télépilote doit retrouver des conditions de vol acceptables dans un délai court et adapté.
A défaut, atterrissage d’urgence avec coupure des moteurs et déclenchement du dispositif de protection des tiers (si équipé). C’est obligatoire en cas de vol avec un aéronef de plus de 2kg en scénario S3. C’est un coupe-circuit indépendant accompagné d’un dispositif permettant de limiter l’énergie à 69 joules lors de l’impact avec le sol. Dans la majorité des cas, c’est un parachute.

Pour les drones entre 4 et 8kg, le dispositif de protection des tiers doit être accompagné d’une télécommande avec batterie indépendante, d’une alarme sonore et d’un système d’éjection. La distance de déploiement doit être inférieure à 15m lors de la chute du drone.
Il existe également un dispositif d’enregistrement des 20 dernières minutes du vol, nécessaire dans le scénario S2, qui enregistre la localisation de l’aéronef, son altitude et l’intensité du signal. Il est accompagné d’un dispositif de coupure des moteurs indépendant.
Le dispositif de retour vidéo est également obligatoire dans le scénario S2. La perte de signal vidéo doit entraîner l’atterrissage de l’aéronef. Le télépilote peut, pendant un délai court et adapté, tenter de retrouver une situation normale ou faire revenir le drone à son emplacement de décollage.
L’énergie de cinétique à l’impact Ec est proportionnelle à la masse m du drone et au carré de la vitesse V : Ec = 1/2 m V2 -> permet de calculer la vitesse maximale à respecter en fonction de la masse pour respecter la limite des 69 joules.
Si on considère le drone en chute libre, l’accélération verticale du drone est égale à l’accélération de la pesanteur « g ». La vitesse atteinte « V » et la hauteur de chute « h » dépendent de la durée « t » du déploiement, soit V=g.t et h=1/2.g.t2 sachat que g=9.81m/s
1.6 – Les hélices
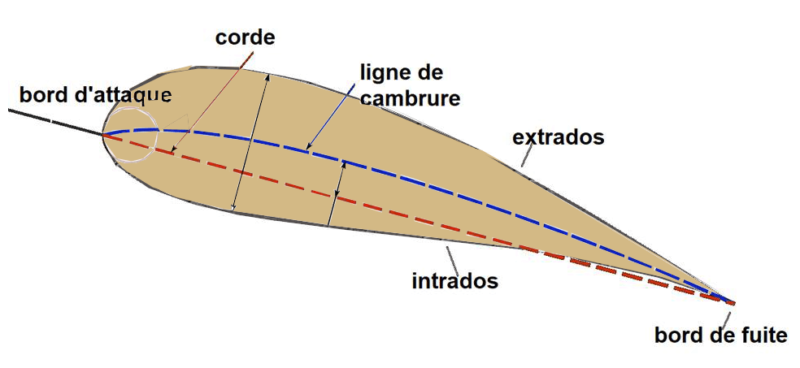
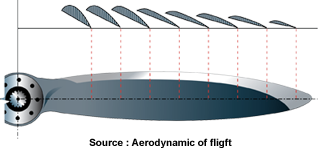
C’est une pale fixée sur un moyeu. Le plan de référence des hélices est perpendiculaire au moyeu. Le diamètre de l’hélice est le diamètre du cercle décrit par les bouts de pales en rotation autour de l’axe du moyeu. La corde de l’hélice (segment le plus long reliant le bord d’attaque au bord de fuite) ne peut pas être dans le plan de l’hélice pour pouvoir générer une force de traction. L’angle entre le plan de rotation de l’hélice et la corde de profil s’appelle le CALAGE. Le calage du profil diminue du moyeu vers le bout de pale pour harmoniser le comportement aérodynamique de chaque profil avec une incidence constante.
En voilure tournante, les hélices en rotation produisent la portance nécessaire au décollage de l’aéronef. En voilure fixe, les hélices produisent la poussée, et les ailes fournissent la portance.
Les hélices ont un sens de rotation qui suit la rotation du moteur sur lequel elles sont fixées, dans le sens horaire CW ou anti-horaire CCW.
La rotation de l’hélice génère un vent relatif sur chaque pale. En intensité, ce vent relatif est égal au produit de la vitesse de rotation par la distance de l’élément de pale par rapport à l’axe. Le calage va offrir une incidence au vent relatif, qui va générer une résultante aérodynamique élémentaire, perpendiculaire au plan de rotation. Cette force aérodynamique produit la traction de l’hélice, mais aussi un couple résistant que le couple du moteur doit équilibrer.
La puissance fournie par le moteur sur l’arbre d’hélice = couple resistant x vitesse de rotation. Le couple s’exprime en N.m (Newton-mètre), et la puissance en Watt (W).
Pour un drone à voilure tournante en vol stationnaire, la résultante de la traction des hélices (ou rotors) = poids du drone.
Elles se distinguent par leurs diamètres et leur pas (calage).
- Le PAS est la distance théorique parcourue par l’hélice lorsqu’elle effectue une rotation. C’est la distance d’avancement du profil si l’hélice « se visse » dans l’air. Une hélice avec un petit pas aura une meilleure traction qu’une hélice avec un grand pas sur vitesse équivalente, mais elle permettra d’aller moins vite.
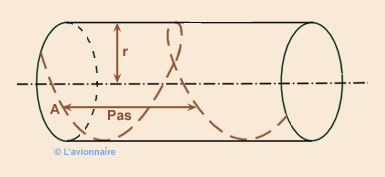
- Plus l’hélice a un diamètre important, plus la traction et le vol de l’aéronef seront stables, mais comme elle sera plus lourde, elle nécessite davantage d’énergie pour être mise en rotation. Une hélice plus petite engendre un vol moins stable mais moins énergivore.
L’expression de ces valeurs se fait en pouce. Une inscription « 6050 » sur le moyeu de rotation signifie que l’hélice à un diamètre de 6.0 pouces et un pas de 5.0 pouces.
L’angle de calage : c’est l’inclinaison de l’hélice sur le plan de rotation de référence. Cet angle de calage est décroissant entre le moyeu et l’extrémité de l’hélice, de façon à obtenir une résistance homogène sur son diamètre. L’angle de calage d’une hélice est généralement déterminé à 75% du rayon de la pale.
La corde : c’est la distance au sein de l’hélice reliant ses deux extrémités latérales, il s’agit du Bord de Fuite et du Bord d’Attaque.
Pour un angle d‘incidence positif, la sustentation d’une aile résulte des différences de pression entre l’extrados et l’intrados. La dépression sur l’extrados contribue aux 3/4 de la sustentation.
La finesse d’un drone à voilure fixe (type avion) est maximale lorsque le rapport portance sur traînée est maximal.
1.7 – Les moteurs et l’ESC
Les drones sont équipés de moteurs sans balais Brushless, donc faible usure et alimentés par une charge discontinue qui entraine la rotation d’un champ électrique synchronisé sur la fréquence d’alimentation.
Le STATOR est équipé d’électro-aimants alimentés de façon séquentielle de façon à faire tourner le ROTOR lui équipé d’aimant. L’ESC (Electronic Speed Controller) veille à la bonne rotation du moteur en segmentant le courant continu et fournissant le rythme permettant le fonctionnement du moteur. Ainsi, les aimants sont sans cesse attirés par un électro-aimant. Le moteur BRUSHLESS fonctionne sans friction, sans point de contact, grâce à la rotation du champ magnétique.
Pour activer les bobines (les électro-aimants) au bon moment, il faut un ESC, un contrôleur qui estime en permanence la position des aimants par rapport aux électro-aimants.
Le moteur est caractérisé par une plage de tension, en Volts.
Il est également caractérisé par un coefficient Kv, c’est à dire le nombre de tours par minute que peut réaliser le moteur pour 1 Volt injecté, sans charge, c’est à dire sans hélice. Ce Kv définit le couple du moteur électrique.
Un Kv faible va faire tourner lentement de grandes hélices.
Un Kv élevé va faire tourner vite de petites hélices.
Le moteur est caractérisé par le rendement, qui est un rapport entre la puissance mécanique que fournit le moteur sur l’arbre de sortie et la puissance électrique fournie en entrée. Un Brushless a un rendement entre 70 et 80%.
Enfin, dernière caractéristique du moteur, l’intensité maximale acceptable par le moteur, et l’intensité de rendement maximal, utilisable en vol de croisière.
Sur un drone multirotor, le contrôleur ESC est réellement la seule commande de vol. Toutes les commandes générées par le contrôleur de l’asservissement en attitude arrivent sur l’ESC de chaque moteur, qui va accélérer ou ralentir ledit moteur pour contrôler l’aéronef.
L’ESC ajuste à fréquence élevé les commutations du courant continu qu’il reçoit pour activer les bobines du moteur au bon moment et à la bonne vitesse selon la commande de l’autopilote. Plus la fréquence est élevée, meilleur est le contrôle du drone. L’autopilote reçoit les consignes de tous les capteurs, et ajuste le vol en fonction. par conséquent, si la fréquence est de 1 KHz, soit 1000 mesures par seconde, le contrôle sera parfait puisque la dynamique physique d’un drone est inférieure à 1KHz.
QCM
Suite au dépassement de la limite élastique d’un composant, ce dernier : 2 – aura une résistance moins importante, 4 – doit être remplacée,
La fonction d’un disjoncteur au sein d’un circuit électrique est : De préserver le circuit des surcharges. Le disjoncteur a vocation à protéger le circuit électrique de surcharge. Le passage du courant est limité par une résistance et le maintien d’une intensité à valeur constante émane d’un régulateur.
Pour les aérodynes de plus de 4 kg évoluant en scénario S3, le système de protection des tiers : Comprend une alarme pour indiquer la chute de l’appareil. Pour les drones de 4 à 8 kilos, le dispositif de protection des tiers doit pouvoir être contrôlé, être accompagné d’une télécommande et d’une batterie indépendante, d’une alarme sonore et d’un système d’éjection
Votre aéronef télépiloté fonctionne avec des batteries LiPo 10S, vous pouvez alors placer : 1 – deux batteries 5S en série, 4 – deux batteries 10S en parallèle.
Un aéronef sans équipage à bord qui évolue de façon automatique en permettant qu’un télépilote surveille et intervienne sur sa trajectoire réalise : un vol atomatique
Sélectionnez l’abréviation indiquant qu’une hélice tourne dans le sens horaire : CW.
Vous disposez d’une LiPo 4S2P de 8 000 mAh. La puissance de cette batterie est : 118,4 Wh. Une seule cellule présente une tension de 3,7 volts. Pour augmenter cette valeur, les cellules LiPo sont connectées en série. On trouve des modèles 3S (3 cellules), 4S (4 cellules), voire 6S (6 cellules). Sur une batterie 4S, la tension est de 4 x 3,7 volts, soit 14,8 volts. Sur certaines batteries, on trouve aussi une valeur P. Par exemple: 4S2P. Le P signifie «parallèle». Dans cet exemple, il s’agit donc de deux 4S connectées en parallèle. Nous n’additionnons pas les tensions de nos 2 modules 4S. Nous avons donc (4 x 3,7 x 8)/1000 = 118,4 Wh.
L’enregistrement des paramètres doit toujours être présent lors d’évolutions en scénario : 2 – S2. n cas d’évolution en scénario S-2, l’aéronef doit enregistrer des paramètres de vol substantielles à savoir : – l’attitude de l’aéronef télépiloté – son emplacement – la qualité du signal de la commande de vol. Cet enregistrement doit être présent pour les 20 dernières minutes de vol.
Lors d’un vol réalisé en scénario S2, l’enregistrement des paramètres de vol est impératif pour : Les vingt dernières minutes.
Que signifie l’affichage « 4S » sur une batterie LiPo ? Le nombre de cellules montées en série.
Le nombre minimal de satellites GPS disponibles nécessaires pour calculer la position complète d’un aéronef (latitude, longitude et altitude) est : 4. 3 satellites sont nécessaires pour obtenir une position sur le globe grâce au principe de triangulation. 4 satellites sont nécessaires pour un plus ajouter la notion d’altitude.
Votre système de vol embarqué est opérationnel grâce à des batteries LiPo8S, vous avez donc la possibilité de placer : 2 batteries 4S en série, 2 batteries 8S en parallèle.
Les aéronefs télépilotés pesant 850g évoluant dans un scénario S3 : Ne sont pas dans l’obligation de l’emport d’un dispositif de protection des tiers. Le dispositif de protection des tiers est obligatoire en cas de vol avec un aéronef de plus de 2 kilos réalisé en scénario S3. Il se compose d’un coupe circuit indépendant accompagné d’un dispositif permettant de limiter l’énergie à 69 joules lors de l’impact avec le sol
Les aéronefs destinés à être employés en scénario S2 et fabriqués à partir du 01.01.2017 doivent disposer : D’une commande d’arrêt du moteur indépendante du système de contrôle de la trajectoire. Les conditions techniques liées au vol en S2 : – Information cartographique sur la position et le déplacement de l’aéronef – Possibilité de programmer des limites latérales dont le franchissement est interdit ou déclenche une alarme – La fonction de coupure des moteurs doit être indépendante du contrôleur de vol / pilote automatique (applicable pour les demandes d’homologation depuis le 01/01/2017) – Enregistrement des paramètres essentiels des 20 dernières minutes de vol
Un dispositif de limitation d’espace visant à éviter qu’un aéronef dépasse une altitude ou une hauteur maximale programmable est : Obligatoire pour l’ensemble des aéronefs non captifs. La configuration des barrières virtuelles : Les barrières virtuelles, obligatoires en termes d’altitude et de distance, doivent être paramétrées de manière à empêcher l’aéronef de dépasser l’espace de vol autorisé sans déclencher ces barrières. Si les barrières ne sont pas disponibles pour une raison quelconque (défaillance, mode de vol où les barrières ne sont pas actives), le vol ne doit pas être effectué ou, si nécessaire, doit être arrêté.
Dans un circuit électrique, un fusible protège contre : Une surintensité. Un fusible est comme une « soupape de sécurité » pour un circuit électrique, qui « saute » lorsqu’un courant (intensité) trop élevé tente de passer à travers lui, protégeant ainsi le reste du circuit contre les dommages potentiels.
La tension nominale d’une batterie 2S1P est de : 7,4 V. 2S correspond à 2 éléments en série, nous retiendrons le calcul suivant : 2 x 3,7 V = 7,4 Volts.
Durant un vol assisté du mode GPS avec un aéronef sans équipage à bord de type multirotor, la méthode la plus adaptée pour contrer un gradient de vent trop important est : De diminuer la hauteur de vol. De manière générale, plus nous prenons de l’altitude, plus le vent s’intensifie. Afin de retrouver un vent plus faible, nous devons diminuer l’altitude de notre aéronef.
L’alimentation de l’ensemble des appareils embarqués et accessoires nécessaires pour mener à bien la mission : Est identique à l’alimentation des moteurs. L’alimentation est d’une même intensité pour l’aéronef et ses équipements. Seul le dispositif de protections des tiers doit avoir une batterie indépendante pour les drones de 2 à 4 kilogrammes.
Comment est exprimée la tension d’une batterie ? En Volt. Tension (U) en Volt, intensité (I) en Ampères, Résistance (R) en Ohm. U = R x I
Un aéronef télépiloté de 5 kg évoluant en scénario S3, doit être muni d’un dispositif de protection des tiers : Qui doit pouvoir être déclenché en cas de panne de la radiocommande.
Le vol en immersion avec retour vidéo pour un aéronef évoluant dans un scénario (S1 ou S3) et pour lequel le télépilote ne dispose pas d’une vue directe de l’aéronef est : Possible à condition qu’un second télépilote conserve l’aéronef en vue direct. Le vol en immersion est une situation où le télépilote ne peut observer l’environnement de l’aéronef que par retour vidéo sur lunettes FPV ou écran, on considère qu’il n’a pas la vue direct sur ce dernier. Il s’agit d’une pratique possible dans les scénarios S-1 ou S-3 à condition qu’il y ait un deuxième intervenant gardant l’aéronef en vue et qu’il soit équipé d’une télécommande permettant une prise de contrôle de l’aéronef à tout moment.
Sélectionnez la définition de la conductivité électrique : La capacité d’un composant à diriger et se faire traverser par un courant électrique. La conductivité est l’opposé de la résistivité, elle correspond à la capacité d’un matériau à conduire et permettre le passage de l’électricité.
Les aéronefs télépilotés pesant plus de 2 kg évoluant en scénario S3 : Sont dans l’obligation d’être équipés d’un dispositif de protection des tiers. Le dispositif de protection des tiers est obligatoire en cas de vol avec un aéronef de plus de 2 kilos réalisé en scénario S3. Il se compose d’un coupe circuit indépendant accompagné d’un dispositif permettant de limiter l’énergie à 69 joules lors de l’impact avec le sol.
Pour les drones de 4 à 8 kilos, le dispositif de protection des tiers doits pouvoir être contrôlé, être accompagné d’une télécommande et d’une batterie indépendante, d’une alarme sonore et d’un système d’éjection
Vous constatez qu’il n’est pas possible de mettre en place des limites de vols ou barrières virtuelles lors de la programmation de votre vol, que faites-vous ? Vous reportez le vol. Lorsque le télépilote n’est pas en mesure d’assurer pleinement l’évolution de son aéronef au sein d’une zone de vol préalablement définie, il ne peut pas entreprendre le vol.
Une hélice est caractérisée par : 2 – l’extrados, 3 – le bord d’attaque, 4 – le bord de fuite, 5 – le sens de rotation, 6 – l’intrados.
Où se situe le contrôleur des commandes de vol d’un aéronef sans équipage à bord ? Entre l’émetteur-récepteur du signal et le contrôleur moteur.
L’émetteur-récepteur du signal, aussi connu comme un récepteur de télécommande, est généralement situé à l’intérieur du drone. Il reçoit les signaux de la télécommande de l’opérateur (ou de la station de contrôle au sol) et les transmet au contrôleur de vol.
Le contrôleur de vol interprète les signaux reçus de l’émetteur-récepteur et donne des instructions au contrôleur moteur et à d’autres systèmes sur l’aéronef, comme les servomoteurs qui contrôlent les gouvernes (dans le cas des drones à ailes fixes) ou les moteurs qui contrôlent la vitesse et la direction de vol (dans le cas des drones à rotors multiples). Le contrôleur moteur, aussi appelé ESC (Electronic Speed Controller), reçoit les instructions du contrôleur de vol et ajuste la vitesse des moteurs en conséquence. Il peut y avoir un ESC pour chaque moteur sur le drone, surtout dans le cas des drones à rotors multiples.
Sur un moteur tournant dans le sens horaire, vous devez utiliser : Une hélice horaire.
La tension nominale d’une batterie 3S1P est de : 11,1 V.
Un aéronef utilisé en scénario S2 doit être équipé d’un dispositif permettant d’enregistrer les paramètres de vol essentiels à savoir : 1 – La hauteur de l’aéronef télépiloté, 2 – Son emplacement, 3 – La qualité du signal de la commande de vol.
L’entretien de l’aéronef concerne : L’intégralité de ses composantes et accessoires.
La personne commandant les évolutions d’un aéronef télépiloté ou en mesure d’intervenir sur un itinéraire programmé lors d’un vol automatique ou programmant les points de traversée lors d’un vol automne est : Le télépilote.
Calculez la capacité en ampères-heure d’une batterie avec une puissance de 70W et une tension de 10V : 7 Ah. La capacité d’une batterie en Ampères-heure s’obtient par la formule : Watts / Volts. On peut donc faire le calcul : 70 / 10 = 7 Ampères-heure.
Quelle est votre réaction dans le cas d’une perte de la liaison radiocommande ou du contrôle de votre aéronef ? Vous réalisez un atterrissage contrôlé ou forcé par coupure des moteurs.
Afin de procéder à la vérification de l’état d’une batterie avec un voltmètre : Le télépilote doit connecter une charge à la batterie afin d’obtenir des informations sur son état. Un contrôle visuel de la batterie est nécessaire mais insuffisant. Lorsque vous connectez la charge et que le courant circule, une absence de baisse significative de la tension signifie que la batterie fonctionne.
Le dispositif de limitation d’espace visant à rendre impossible le franchissement d’une altitude ou d’une hauteur définie pour l’aéronef : Rend impossible toute action permettant le franchissement des limites définies. Le dispositif de limitation d’espace automatisé freine l’aéronef en cas de dépassement d’une altitude ou d’une hauteur maximale programmée.
Sur une batterie LiPo 4S1P de 5 000 mAh, l’inscription 35C correspond à un courant de sortie disponible de : 175 ampères. Le courant de sortie sera calculé comme suit : (5 000 mAh/1000) x 35C = 175 Amperes, cette batterie LiPo a un courant de sortie disponible de 175A.
Lors de l’utilisation du parachute comme dispositif de protection des tiers, la hauteur maximale perdue avant stabilisation est de : 15 mètres ou moins.
Quelle est la signification de la lettre ‘C’ sur une batterie LiPo ? Il s’agit de la capacité maximale de décharge de la batterie.
Quelle est l’information donnée par les références inscrites sur une hélice ? Diamètre et pas.
Le dispositif de protection des tiers pour un aérodyne de 3kg évoluant dans un scénario S3 est :
Obligatoire.
Lors de la réalisation d’un vol d’aéronef, l’information concernant l’altitude et la hauteur : Doit rester à disposition du télépilote. Conditions techniques pour tous les scénarios :
– Information d’altitude basée sur un capteur barométrique
– Possibilité de programmer une hauteur maximale de vol
– Possibilité de couper les moteurs en vol
– Fonction « fail-safe » en cas de perte de la liaison de contrôle.
Votre aéronef sans équipage à bord n’utilise pas d’anémomètre mais un système de positionnement satellitaire. La vitesse lue sur votre radiocommande est : La vitesse sol. La vitesse sol fait référence à la vitesse réelle de l’aéronef par rapport à la surface terrestre. Elle est calculée en utilisant les données de position fournies par le système de positionnement satellitaire.
Le dispositif informant le télépilote que le drone va sortir de la zone de vol ou l’en empêche est : Toujours obligatoire.
Le dispositif de protection des tiers pour un aérodyne de 900g évoluant en scénario S1 est : Facultatif.
Le système de limitation d’impact d’un aéronef sans équipage à bord doit restreindre l’énergie d’impact à : 69 joules. (2 kilos réalisé en scénario S3)
Dans un circuit en série composé de deux lampes. Si l’une d’entre elle est cassée, la seconde : Ne brille pas.
Comment est appelé le programme intégré au système d’un aéronef télépiloté, à sa radiocommande et à certaines batteries intelligentes ? Il s’agit du firmware.
A l’erreur instrumentale près, l’indication fournie par le compas a pour référence le nord : Magnétique. Le nord magnétique est la direction vers laquelle pointe l’aiguille aimantée d’un compas en réponse au champ magnétique terrestre.
Les éléments qui constituent la charge utile d’un aéronef sans équipage à bord sont : 1 – le capteur d’images, 2 – la nacelle. La charge utile caractérise les équipements complémentaire pour la réalisation d’une mission
Votre système de limitation d’impact est un parachute utilisant la gravité pour se déployer en 2 secondes. Selon l’équation h = 1/2.g.t², la hauteur de déclenchement minimum à respecter pour limiter l’énergie lors de l’impact est d’environ : 20 m. Pour obtenir ce résultat, il est nécessaire d’utiliser l’équation h=1/2.g.t2
Lexique : trajectoire (h), temps (t), gravité (g) = 9,81 arrondi à 10 m/s). h = 1/2 x 10 x 2² = 20m. La hauteur de la chute dépend du temps de déploiement.
Vous effectuez un vol automatique, votre aéronef s’écarte du trajet programmé : Je reprends l’aéronef en mode manuel.
La formule h=1/2.g.t² illustre la loi de : Galilée. Cette formule décrit comment un objet tombe lorsqu’il est en chute libre, c’est-à-dire qu’il est en mouvement sous l’influence de la gravité seule, sans aucune autre force agissant sur lui (comme la résistance de l’air).